机器人与物理 AI
研究人员开发出可以按照期望形式移动的微型机器人集群
来自包括马克斯·普朗克智能系统研究所(MPI-IS)、康奈尔大学和上海交通大学在内的各个机构的研究人员团队已经开发出可以按照任何期望形式移动的微型机器人集群。
该研究由Gaurav Gardi和MPI-IS的Metin Sitti教授、康奈尔大学的Steven Ceron和Kirstin Peterson教授以及上海交通大学的Wendong Wang教授领导。
该研究题为“具有可重构形态、行为和功能的微型机器人集群”,已发表在 自然通讯 杂志上。
重新配置微小颗粒
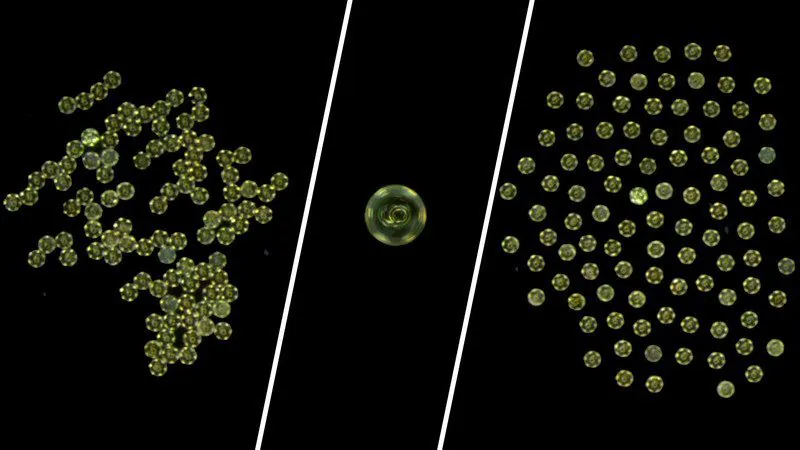
这些微小颗粒能够非常快速地重新配置集群行为。当漂浮在水面上时,微型机器人盘可以以圆形移动、跳舞、像气体一样扩散、聚集在一起或形成一条直线。
每个个体机器人比人类头发的宽度稍大,它们使用聚合物3D打印,然后涂上一层薄的钴顶层。金属使微型机器人具有微小磁铁的能力,而线圈在电流流过时会产生磁场。这种磁场使颗粒能够在一个约一厘米宽的水池中精确移动。
一个令人印象深刻的例子是,当机器人形成一条线时,研究人员可以移动它来“写”出水中的字母。
集群机器人的发展受到自然界中集群行为和集群模式的影响,例如鸟群。机器人集群行为的实施近期非常流行。
然而,当单个颗粒太小,无法进行计算,或者机器人只有300微米宽时,它就不能被编程为算法。为了弥补这一点,研究人员必须依靠三种不同的力量。第一种力量是磁力,当两个磁铁具有相反的极性时会相互吸引,或者两个相同的极性会相互排斥。
第二种力量是流体环境,即机器人周围的水。这可以在颗粒在水中游泳时看到,导致水被排出并改变周围的其他颗粒。漩涡的速度和磁力决定了颗粒如何相互作用。
第三种力量涉及两个颗粒相邻漂浮,这通常会导致它们漂向对方。水面被弯曲以使它们聚集在一起。
控制机器人
研究人员使用这三种力量来为数十个微型机器人创建一个集体和协调的运动模式。科学家可以通过显示最适合给定障碍的形式来引导机器人通过障碍赛。例如,微型机器人将排成一列以通过狭窄的通道。
机器人可以实现多种不同的运动模式和形态,这是通过外部计算实现的。算法被编程为创建磁场,既可以旋转也可以振荡,这会触发机器人的期望运动。
Gaurav Gardi是MPI-IS物理智能部门的博士生。他是该研究的共同第一作者,另一位是Steven Ceron。
“根据我们如何改变磁场,盘状物会以不同的方式表现,”Gaurav Gardi说。“我们正在调整一种力量,然后是另一种力量,直到我们得到我们想要的运动。如果我们在线圈中过于激烈地旋转磁场,导致水移动的力太强,盘状物会彼此远离。如果我们旋转得太慢,吸引颗粒的奶油卷效应太强。我们需要在这三种力量之间找到平衡。 ”
该领域的研究人员还正在努力使这些微型机器人集群变得更小。
“我们的愿景是开发一个由仅一微米大小的颗粒组成的系统。这些集群可以潜入人体,通过复杂的环境导航,以输送药物,例如阻塞或解除阻塞通道,或者刺激难以触及的区域,”Gardi说。
Metin Sitti领导物理智能部门。
“具有强大过渡的机器人集群在运动行为方面非常罕见。然而,这样的多功能系统在复杂环境中操作非常有优势。我们很高兴能够开发出如此强大和按需可重构的集群。我们认为我们的研究是未来生物医学应用、微创治疗或环境修复的蓝图,”Metin Sitti说。












