机器人
由 AR 眼镜引导的柔性机器人臂
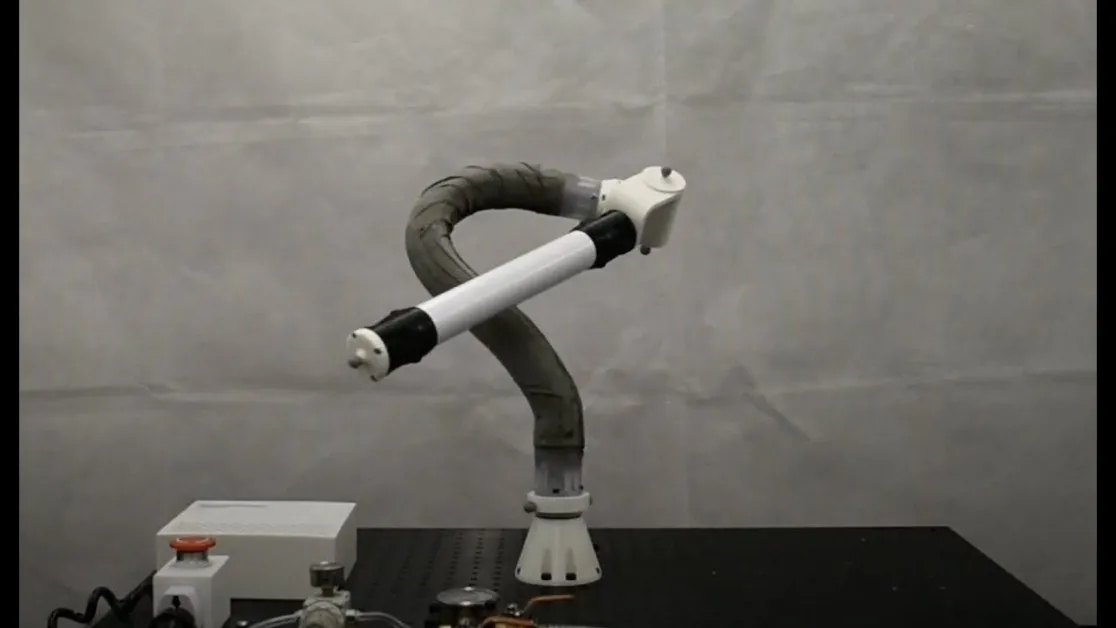
伦敦帝国学院的研究人员创建了一个可以由个人使用增强现实(AR)眼镜引导的柔性机器人臂。该高度可定制的机器人臂可以在所有方向上扭曲和转动,并可用于航天器维护、制造和伤害康复等领域。
人们可以手动将机器人臂弯曲成每个任务所需的形状,这是由于内部的迈拉片层。每一层迈拉片可以相互滑动并锁定到位。话虽如此,一些用户在没有指导的情况下难以弯曲机器人臂。
实施 AR 技术
为了克服这些挑战,帝国的 REDS(机器人操作:工程、设计和科学)实验室的研究团队设计了该系统,以便用户可以依靠 AR 来配置机器人。使用混合现实智能眼镜和运动跟踪摄像头,用户会看到模板和设计,这些模板和设计会叠加到现实世界环境中。然后可以调整机器人臂以匹配模板。为了使事情更容易,模板在成功配置时会变成绿色,机器人臂会锁定到位。
伦敦帝国学院戴森学校的设计工程学高级作者尼古拉斯·罗哈斯博士(Dr. Nicolas Rojas)是该研究论文的高级作者。
“调整这些机器人臂时,一个关键问题是其新位置的准确性。我们人类不擅长确保新位置与模板相匹配,这就是为什么我们寻求 AR 的帮助,”罗哈斯博士说。
“我们已经证明,AR 可以简化与我们的可塑性机器人一起工作。这种方法为用户提供了一系列易于创建的机器人臂位置,适用于各种应用,而无需太多的技术专业知识。”
测试和应用系统
该系统在五名年龄在 20-26 岁之间、具有机器人经验但没有可塑性机器人操作经验的男性身上进行了测试。根据发表的论文,他们能够使用新系统成功地和准确地调整机器人臂。
这种系统有很多应用,例如制造和车辆维护。机器人臂的轻量使其特别适合用于航天器维护,其温和性使其能够用于伤害康复。
博士生研究员亚历克斯·兰尼(Alex Ranne)和安格斯·克拉克(Angus Clark)是该研究的共同第一作者。
“在很多方面,它可以被视为一个分离的、更灵活的第三只手臂。它可以帮助在额外的手臂可能很有用的许多情况下,并有助于分担工作量,”两人说。
研究人员将继续改进机器人臂及其 AR,并将尝试引入触觉和音频元素以提高机器人臂的准确性。另一个主要目标是加强机器人臂,因为当其锁定到位时会变得不那么僵硬。这些特性可能会影响精度和准确性。












