机器人
机器人通过观看人类学习的方法
卡内基梅隆大学(CMU)的研究人员开发了一种新的学习方法,使机器人能够直接从人类交互视频中学习,并将信息概括到新任务中,这有助于它们学习如何执行家务。这种学习方法称为WHIRL,代表在野外人类模仿机器人学习,它帮助机器人观察任务并收集视频数据,最终学习如何完成工作本身。
该研究在纽约的机器人:科学和系统会议上进行了介绍。
模仿作为学习的一种方式
Shikhar Bahl是卡内基梅隆大学计算机科学学院机器人研究所(RI)的博士生。
“模仿是一种很好的学习方式,”Bahl说。“让机器人直接通过观看人类仍然是该领域的一个未解决的问题,但这项工作在使机器人能够实现这一能力方面取得了重大进展。”
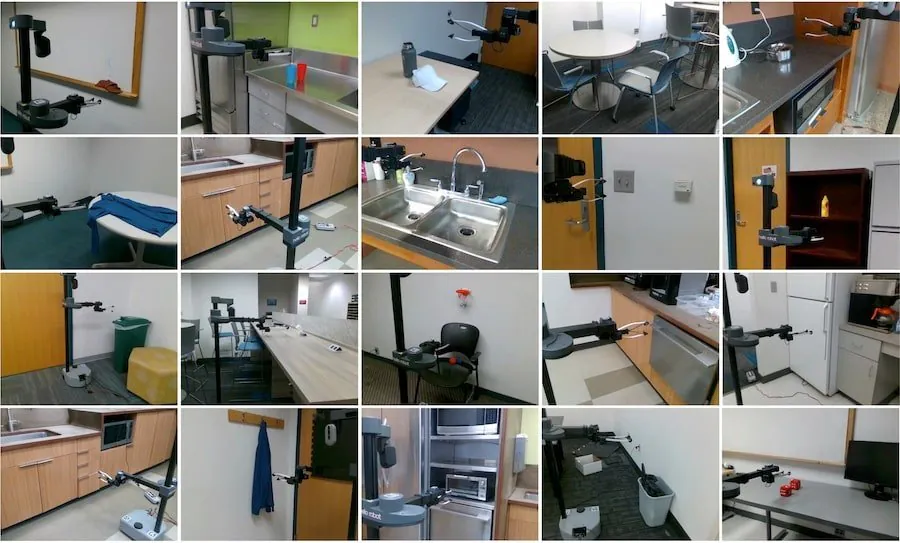
Bahl与Deepak Pathak和Abhinav Gupta合作,他们都是RI的教师。该团队在一台现成的机器人上添加了摄像头和软件,机器人学习了如何完成20多个任务。这些任务包括从打开和关闭电器到从垃圾桶中取出垃圾袋等一切。每次机器人在尝试自己完成任务之前都会观看人类完成任务。
Pathak是RI的助理教授。
“这项工作提出了一种将机器人带入家庭的方法,”Pathak说。“与其等待机器人被编程或训练以成功完成不同的任务,然后再部署到人们的家中,这项技术允许我们部署机器人并让它们通过观看学习如何完成任务,同时适应环境并仅通过观看而改进。”
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL与当前方法的比较
大多数当前的机器人学习方法依赖于模仿或强化学习。模仿学习中,人类手动操作机器人并教它如何完成任务,这需要多次重复才能让机器人学习。强化学习中,机器人通常在模拟中训练数百万个示例,然后将训练适应到现实世界中。
虽然这两种模型在结构化环境中有效地教会机器人执行单个任务,但它们在扩展和部署方面却很困难。但是,使用WHIRL,机器人可以从任何人类完成任务的视频中学习。它也易于扩展,不局限于特定任务,并且可以在家庭环境中运行。
WHIRL使机器人能够在自然环境中完成任务。虽然第一次尝试通常会失败,但它可以在仅仅几次成功后快速学习。机器人并不总是以与人类相同的动作完成任务,但这是因为它具有不同的移动部件。话虽如此,完成任务的最终结果始终相同。
“为了在野外扩展机器人,数据必须可靠和稳定,机器人应该通过自己练习在环境中变得更好,”Pathak说。
