ロボティクス
モジュラー・ロボティクスの未来:EPFLのMori3、ポリゴン・メッシング・ロボット
生物世界からのスウォーム・ビヘイビアとデジタル・スフィアからのポリゴン・メッシングが結びついて、Mori3ロボットの創造を刺激し、モジュラー・ロボティクス分野におけるブレークスルーをもたらした。このEPFLの研究者によって開発された新しい発明は、2Dの三角形からほぼ任意の3Dオブジェクトに変形する可能性を示し、宇宙旅行アプリケーションに大きな約束をもたらした。最近、Nature Machine Intelligenceに掲載された研究は、ロボティクスの未来について興奮する絵を描く。「私たちの目標は、Mori3をモジュラーで、折り紙のようなロボットを作ることであり、それは環境やタスクに応じて自由に組み立てたり解体したりできる」と、Reconfigurable Robotics LabのディレクターであるJamie Paikは述べる。「Mori3はサイズ、形状、機能を変更できる」と彼女は続ける。
Mori3ロボットの理解:ポリゴン・メッシングの力
Mori3ロボットは、個々のモジュールで構成されており、それぞれが三角形の形をしている。これらのモジュールは、さまざまなサイズと構成のポリゴンを形成するためにシームレスにリンクする、ポリゴン・メッシングと呼ばれるプロセスを実行する。ロボティクスのポスドク研究者であるChristoph Belkeは、「私たちは、ポリゴン・メッシングが実行可能なロボティクス戦略であることを示した」とコメントする。 このブレークスルーを達成するには、機械的および電子設計、コンピューター・システム、エンジニアリングを含む複数のロボティクス・アスペクトの境界を押し広げる必要があった。「私たちは、ロボティクスを理解する方法を再考する必要があった」とベルケは説明する。「これらのロボットは、自分の形状を変更し、互いに接続し、通信し、機能的で関節のある構造を形成するために再構成できる」。概念の証明は、Mori3ロボットが重要なロボティクス能力、移動性、オブジェクトの取り扱いと輸送、ユーザー・インタラクションを示していることから、成功と見なされる。
宇宙探査:モジュラー・ロボットの新しいフロンティア
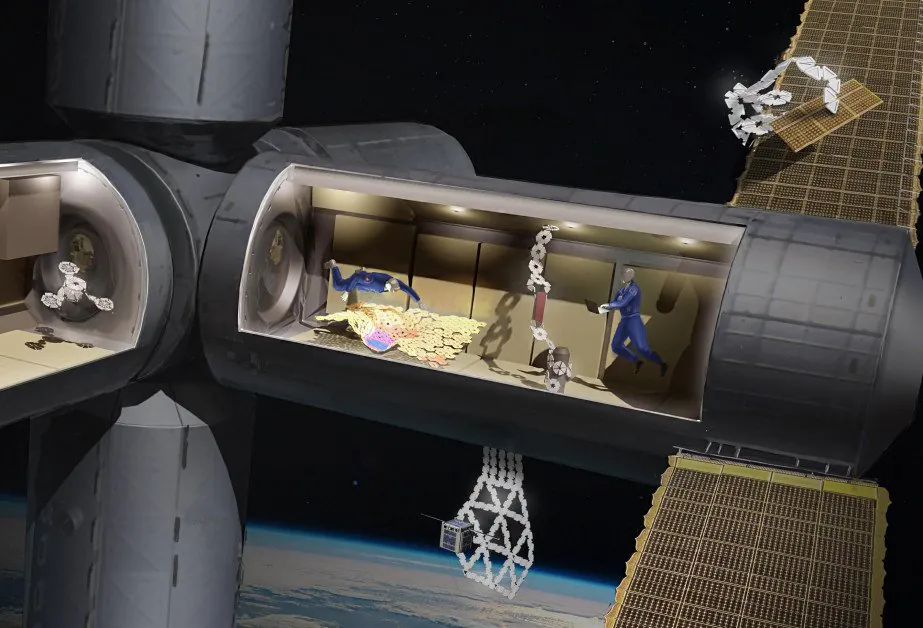
Mori3のようなモジュラーで多機能なロボットは、特に幅広いタスクを実行する必要がある場合、重要な利点をもたらす。これらのタスクは、しばしば形状または構成の変更を必要とする。パイクは、「ポリゴナルでポリモーフィックなロボットが関節のある構造を作成するために互いに接続することができるため、さまざまなアプリケーションで効果的に使用できる」と説明する。また、Mori3のような汎用ロボットは、特定のドメインでは専用ロボットよりも効果的ではない可能性があることを認める。「ただし、Mori3の最大の売り文句は、その汎用性である」とパイクは指摘する。設計者は、Mori3ロボットが宇宙船で使用されることを想定しており、宇宙船では個々のタスクごとに異なるロボットを収容するスペースがない。研究者は、Mori3ロボットが通信目的と宇宙ミッションでの外部修理に使用されることを希望する。
ロボティクスの革新的な飛躍
Mori3の開発は、ロボティクス分野における重要な変化を示し、モジュラー・ロボティクスにおける将来の可能性を示している。デジタルと生物のインスピレーションのユニークな組み合わせは、タスクと環境に応じて形状と機能を変更できるロボットを生み出し、特に宇宙探査において巨大な可能性を持つ。 ただし、技術が進化するにつれて、こうした汎用ロボットの能力が最適化され、潜在的な欠点が慎重に管理されることが重要になる。このロボティクスの革新的な飛躍は、多くの機会と疑問を引き起こし、将来の数年間で注目すべき分野となる。Mori3が道を切り開くにつれて、この先駆的な技術がロボティクスと宇宙探査のアプローチをどのように変えるかを見てみよう。












