Robotik
Lernmethode ermöglicht es Robotern, durch das Beobachten von Menschen zu lernen
Eine neue Lernmethode, die von Forschern an der Carnegie Mellon University (CMU) entwickelt wurde, ermöglicht es Robotern, direkt aus Videos von menschlichen Interaktionen zu lernen und die Informationen auf neue Aufgaben zu verallgemeinern, was ihnen hilft, zu lernen, wie sie Haushaltsarbeiten ausführen. Die Lernmethode wird WHIRL genannt, was für In-the-wild Human Imitating Robot Learning steht, und hilft dem Roboter, die Aufgaben zu beobachten und die Videodaten zu sammeln, um schließlich zu lernen, wie er die Arbeit selbst ausführt.
Die Forschung wurde auf der Robotics: Science and Systems-Konferenz in New York präsentiert.
Nachahmung als Lernweg
Shikhar Bahl ist ein Doktorand am Robotics Institute (RI) der School of Computer Science der Carnegie Mellon University.
“Nachahmung ist eine großartige Möglichkeit, zu lernen”, sagte Bahl. “Es bleibt ein ungelöstes Problem im Bereich, dass Roboter tatsächlich direkt durch das Beobachten von Menschen lernen, aber diese Arbeit macht einen bedeutenden Schritt in Richtung dieser Fähigkeit.”
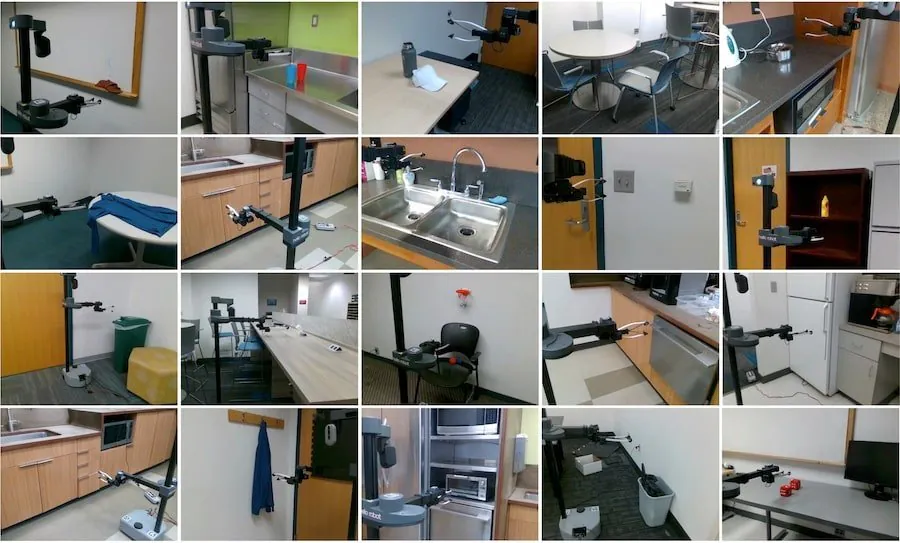
Bahl arbeitete zusammen mit Deepak Pathak und Abhinav Gupta, die beide auch Fakultätsmitglieder im RI sind. Das Team fügte einer Standard-Roboter-Kamera und ihrer Software hinzu, die lernte, über 20 Aufgaben auszuführen. Diese Aufgaben umfassten alles, von der Öffnung und Schließung von Geräten bis zum Entfernen einer Mülltüte aus dem Mülleimer. Jedes Mal, wenn der Roboter einen Menschen bei der Ausführung der Aufgaben beobachtete, bevor er es selbst versuchte.
Pathak ist Assistant Professor im RI.
“Diese Arbeit präsentiert eine Möglichkeit, Roboter in das Zuhause zu bringen”, sagte Pathak. “Anstatt darauf zu warten, dass Roboter programmiert oder trainiert werden, um erfolgreich verschiedene Aufgaben auszuführen, bevor sie in die Häuser von Menschen gebracht werden, ermöglicht diese Technologie es uns, die Roboter zu deployen und sie zu lassen, dass sie lernen, Aufgaben auszuführen, während sie sich an ihre Umgebung anpassen und sich allein durch das Beobachten verbessern.”
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL im Vergleich zu aktuellen Methoden
Die meisten aktuellen Methoden zum Lehren eines Roboters eine Aufgabe basieren auf Nachahmung oder Verstärkungslernen. Bei der Nachahmungslernmethode wird der Roboter von einem Menschen manuell bedient und gelehrt, eine Aufgabe auszuführen, was mehrmals wiederholt werden muss, bevor der Roboter lernt. Bei der Verstärkungslernmethode wird der Roboter normalerweise auf Millionen von Beispielen in einer Simulation trainiert, bevor die Ausbildung auf die reale Welt übertragen wird.
Während beide Modelle effizient darin sind, einem Roboter eine einzelne Aufgabe in einer strukturierten Umgebung beizubringen, erweisen sie sich als schwierig zu skalieren und zu deployen. Aber mit WHIRL kann ein Roboter aus jedem Video eines Menschen, der eine Aufgabe ausführt, lernen. Es ist auch leicht skalierbar, nicht auf eine bestimmte Aufgabe beschränkt und kann in Hausumgebungen arbeiten.
WHIRL ermöglicht es Robotern, Aufgaben in ihrer natürlichen Umgebung auszuführen. Und obwohl die ersten paar Versuche normalerweise mit einem Misserfolg endeten, konnte es sehr schnell lernen, nach nur wenigen Erfolgen. Der Roboter führt die Aufgabe nicht immer mit den gleichen Bewegungen wie ein Mensch aus, aber das liegt daran, dass er unterschiedliche Teile hat, die sich anders bewegen. Mit dem gesagt, ist das Endresultat der Ausführung der Aufgaben immer das gleiche.
“Um die Robotik in der freien Natur zu skalieren, muss die Daten zuverlässig und stabil sein, und die Roboter sollten besser in ihrer Umgebung werden, indem sie auf eigene Faust üben”, sagte Pathak.
