Робототехніка
Штучний інтелект допомагає мікророботам навчитися плавати та орієнтуватися
Команда дослідників з Університету Санта-Клари, Нью-Джерсі Інституту технологій та Гонконзького університету успішно використали глибоке підкріплення навчання, щоб навчити мікророботів плавати. Ця нова розробка є великим кроком вперед у мікроплаванні.
Експерти постійно зосереджені на створенні штучних мікроплавців, які можуть орієнтуватися подібно до природних мікроорганізмів, таких як бактерії. Ці мікроплавці можуть бути використані для різних біомедичних застосувань у майбутньому, таких як цільова доставка ліків та мікрохірургія. Навіть з фокусом на розробці, більшість сучасних штучних мікроплавців можуть виконувати лише прості маневри з фіксованими рухами.
Дослідження було опубліковано в Communications Physics.
Навчання мікроплавців штучним інтелектом
У дослідженні команда вважала, що штучний інтелект може навчити мікроплавців адаптуватися до змінних умов. Мікроплавці, подібно до людей, потребують підкріплення навчання та зворотного зв’язку, щоб навчитися плавати, але вони мають унікальний набір проблем.
Он Шун Пак – асоційований професор механічної інженерії в Університеті Санта-Клари.
“Спроможність плавати на мікрорівні сама по собі є складним завданням”, – сказав Он Шун Пак. “Коли ви хочете, щоб мікроплавець виконував більш складні маневри, проектування їх рухових гайт може швидко стати нездоланним.”
Об’єднання штучних нейронних мереж та підкріплення навчання
Команда об’єднала штучні нейронні мережі (ШНМ) та підкріплення навчання, щоб успішно навчити простий мікроплавець плавати та орієнтуватися у довільному напрямку. Мікроплавець отримує зворотний зв’язок щодо своїх конкретних дій, які він потім використовує для прогресивного навчання, як плавати на основі свого досвіду взаємодії з середовищем.
Алан Цанг – асистент професора механічної інженерії в Гонконзькому університеті.
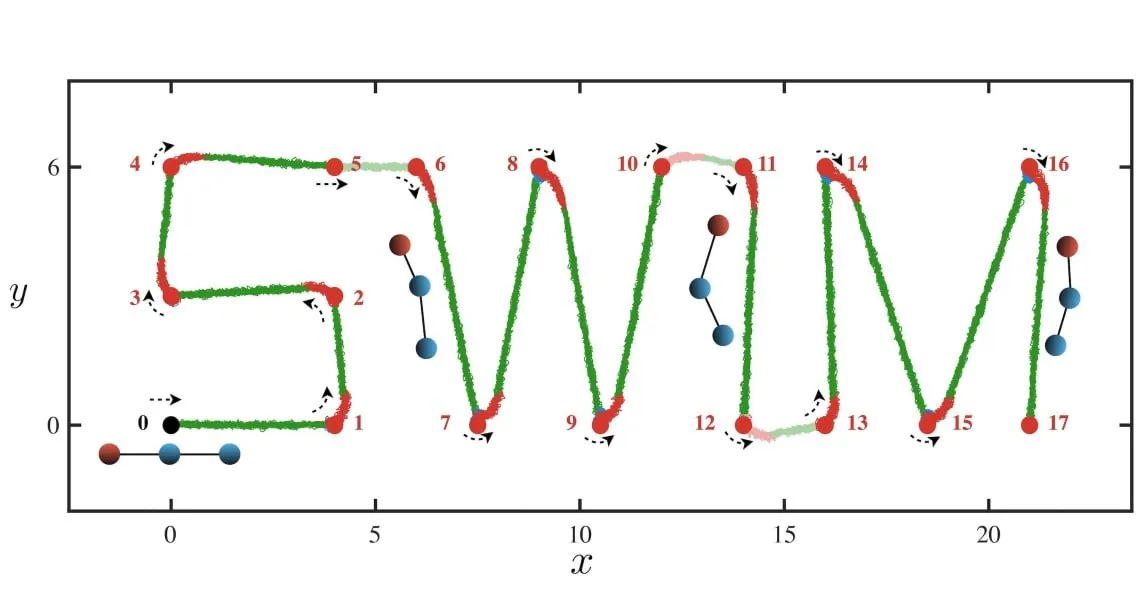
“Подібно до людини, яка вчиться плавати, мікроплавець вчиться рухати свої “частини тіла” – у цьому випадку три мікрочастинки та розтяжні зв’язки – для самопоштовху та повороту”, – сказав Цанг. “Він робить це без довіри до людських знань, а лише за допомогою алгоритму машинного навчання.”
Штучний інтелект-плавець може перемикатися між різними руховими гайтами адаптивно, що дозволяє йому орієнтуватися до будь-якої цільової точки самостійно.
Дослідники продемонстрували потужність мікроплавця, дозволивши йому слідувати складному шляху без явної програми.
Юань-нан Янг – професор математичних наук в Нью-Джерсі Інституті технологій.
“Це наш перший крок у подоланні виклику створення мікроплавців, які можуть адаптуватися, як біологічні клітини, у навігації складних середовищ автономно”, – сказав Юань-нан Янг.
Адаптивна поведінка, така як ця, є тим, що обіцяє багато для біомедичних застосувань.
Арнольд Матійссен – експерт з мікророботів та біофізики в Університеті Пенсільванії. Він не брав участі у дослідженні.
“Ця робота є ключовим прикладом того, як швидка розробка штучного інтелекту може бути використана для подолання нерозв’язаних проблем руху в динаміці рідин”, – сказав Матійссен. “Інтеграція між машинним навчанням та мікроплавцями в цій роботі спровокує подальші зв’язки між цими двома високоактивними дослідницькими галузями.”












