ロボティクス
ロボットが新しく開発された柔軟な足で歩く速度が上がる
カリフォルニア大学サンディエゴ校のロボティクス研究者は、ロボット用の柔軟な足を開発しました。この新しい技術により、ロボットは木片や小石などの不均一な地形で40パーセント速く歩くことができます。
この新しい開発は、特に捜索救助作戦を含むさまざまなアプリケーションにとって重要です。
この研究は、RoboSoft会議で発表されます。この会議は、2020年5月15日から7月15日の間、バーチャルで開催されます。
エミリー・ラソープは、UCサンディエゴのジェイコブス工学学校の博士課程の学生であり、この研究の第一著者です。
「ロボットは、人間が行くことができる場所に、そして行くべきではない場所に、速く効率的に歩くことができるように、自然な不均一な地形で歩く必要があります」とラソープは述べました。
マイケル・T・トーリーは、UCサンディエゴの機械・航空宇宙工学科の教授であり、この研究の筆頭著者です。
「通常、ロボットは特定の関節でのみ動きを制御できます」とトーリーは述べました。「この研究では、ロボットが足の剛性、そして形状を制御できる場合、従来の設計よりも優れて、幅広い地形に適応できることを示しました」
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
柔軟なロボット足
柔軟なロボット足は、コーヒーの粉が入ったラテックス膜で構成されています。コーヒーの粉は、固体と液体の間で往復することができます。コーヒーの粉のような粒状媒体がこのように動作することを可能にするメカニズムは、粒状ジャミングと呼ばれます。結果として、ロボットは歩く速度が上がり、グリップ力も向上します。
ロボットの足が地面に触れると、固くなって地面の形状に合わせて固い足場を確立します。足が動くとき、足は固さを失い、柔らかくなり、サポート構造に頼って、ジャミングされた状態で柔軟性を維持します。
これらの柔軟な足は、不均一な地形でテストされた最初のものでした。

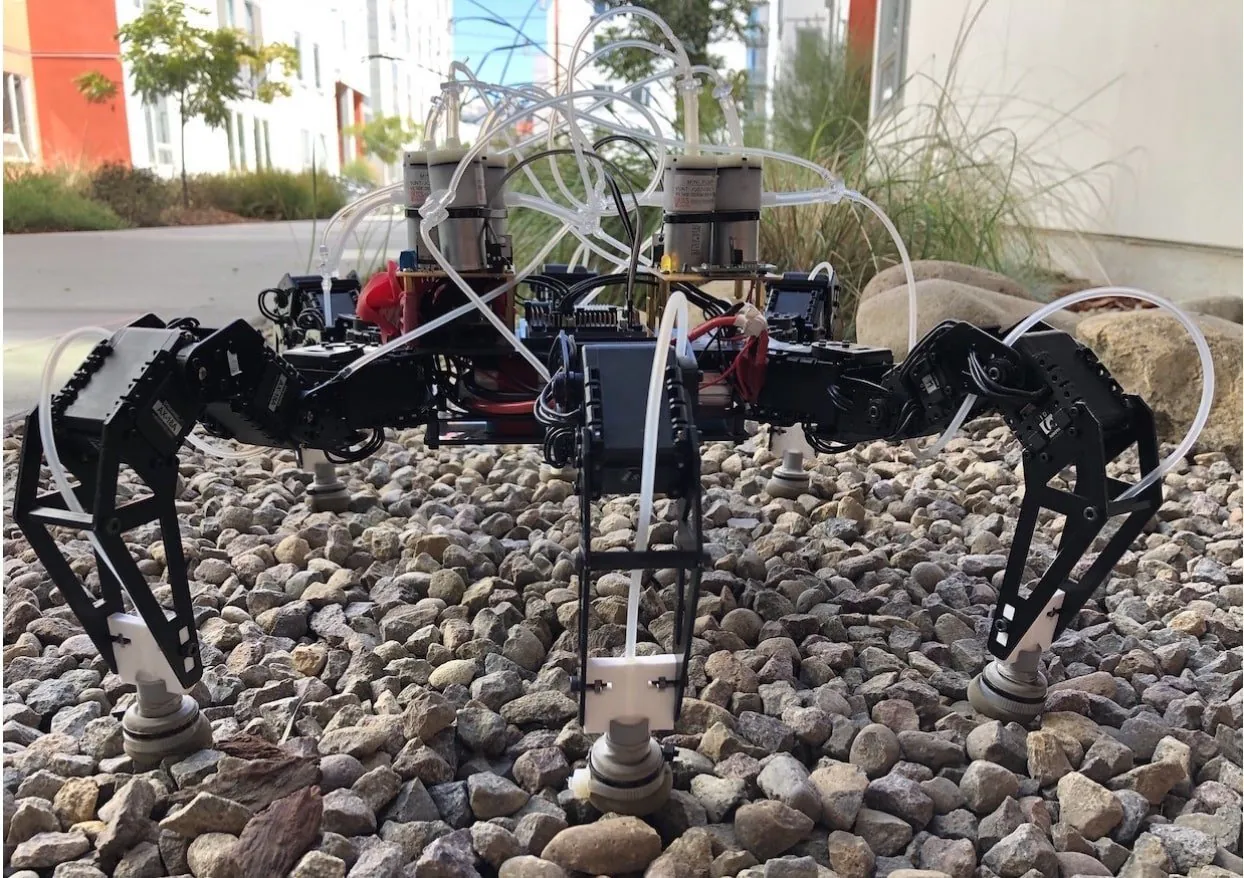
研究者は、六本足ロボットにこれらの足を取り付け、オンボードシステムを設計して構築しました。このオンボードシステムは、各ステップの間で足をジャミングおよびアンジャミングするために、負圧と正圧を生成することができます。足をジャミングするには、真空ポンプがコーヒーの粉の間の空気を除去します。ロボットの重量がコーヒーの粉の間の空気を押し出すことで、パッシブにジャミングすることもできます。
不均一な地形
ロボットは、平坦な地面、木片、石などのさまざまな地形で、柔軟な足を付けた状態と付けていない状態で歩くことがテストされました。結果は、パッシブジャミングは平坦な地面で最も効果的であり、ロックジャミングはゆるい岩で最も効果的であるというものでした。
柔軟な足を使用すると、ロボットの足は地面にしっかりとしがみつくことができ、速度が上がりました。特に、ロボットが傾斜した地形や不均一な地形を歩くときに顕著でした。
ニック・グラヴィッシュは、UCサンディエゴの機械・航空宇宙工学科の教授であり、この研究の共同著者です。
「自然界は、歩くロボットにとって困難な地形でいっぱいです。滑りやすい、岩が多い、柔らかい基盤はすべて、歩くことを複雑にします。地形の異なるタイプに適応できる足は、ロボットの機動性を向上させるのに役立ちます」とグラヴィッシュは述べました。
研究者は、今後、足の底にソフトセンサーを取り付け、電子制御ボードを使用できるようにします。電子制御ボードは、ロボットが歩く地形の種類を識別し、足をアクティブにジャミングするかパッシブにジャミングするかを判断します。研究者は、効率性を向上させるために、設計と制御アルゴリズムをさらに改良する予定です。












