Робототехника
Роботы ходят быстрее с помощью новых разработанных гибких ног
Робототехники из Калифорнийского университета в Сан-Диего разработали гибкие ноги для роботов. Новая технология может привести к тому, что роботы будут ходить на 40 процентов быстрее по неровным поверхностям, таким как галька и древесные щепки.
Это новое развитие важно для различных приложений, особенно для поисково-спасательных миссий.
Исследование будет представлено на конференции RoboSoft, которая будет проходить виртуально между 15 мая и 15 июля 2020 года.
Эмили Лэтроп – аспирантка Школы инженерии Джейкобса в UC Сан-Диего и первый автор статьи.
«Роботы должны уметь ходить быстро и эффективно по природной, неровной местности, чтобы они могли идти туда, куда могут идти люди, но, может быть, не должны», – сказала Лэтроп.
Майкл Т. Толли – профессор кафедры механической и аэрокосмической инженерии в UC Сан-Диего. Он является старшим автором статьи.
«Обычно роботы могут контролировать движение только в определенных суставах», – сказал Толли. «В этой работе мы показали, что робот, который может контролировать жесткость и, следовательно, форму своих ног, превосходит традиционные конструкции и может адаптироваться к широкому разнообразию поверхностей».
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Гибкие роботизированные ноги
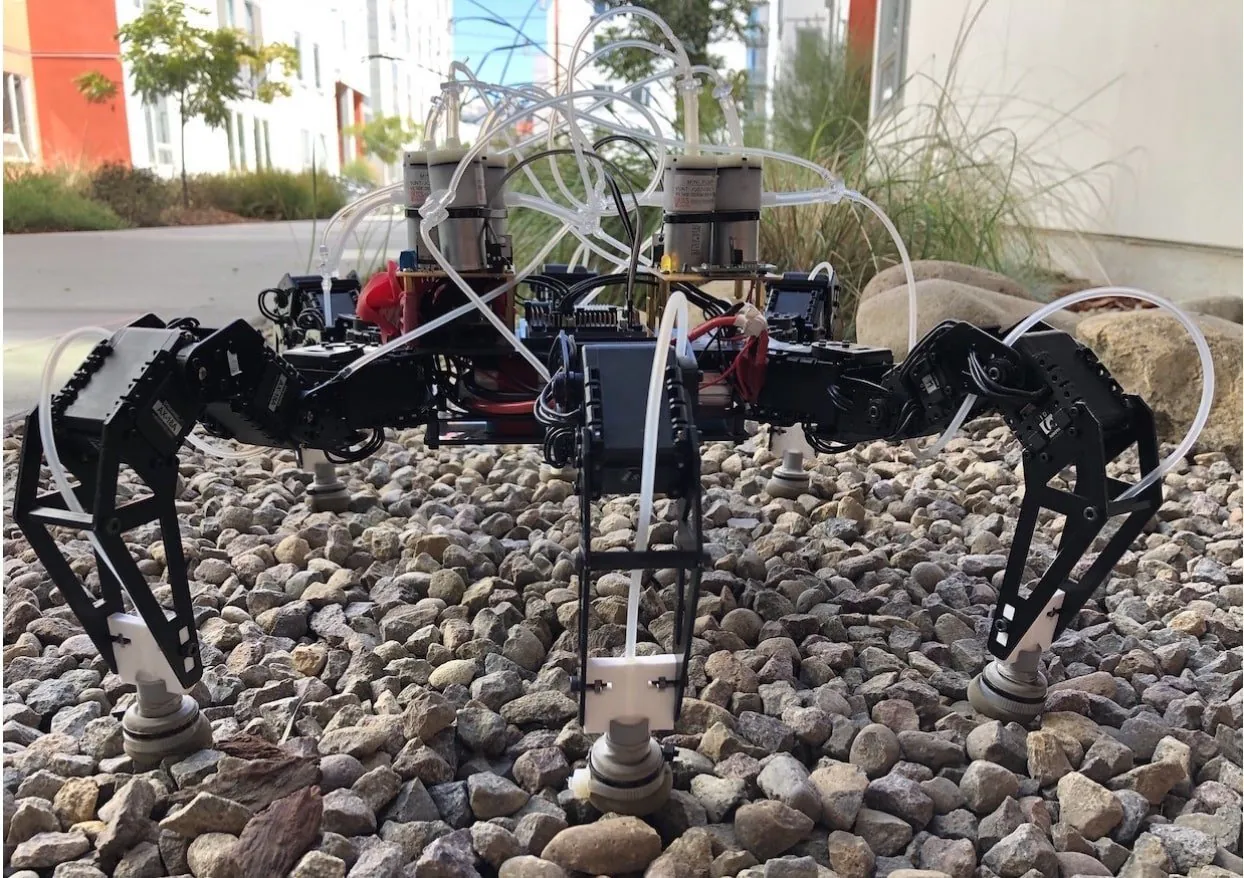
Гибкие роботизированные ноги состоят из латексной мембраны, заполненной кофейной гущей. Кофейная гуща может менять состояние между твердым и жидким. Механизм, который позволяет гранулированным материалам, таким как кофейная гуща, вести себя таким образом, называется гранулированным зажимом. В результате роботы могут ходить быстрее и иметь лучшее сцепление.
Когда роботизированные ноги касаются земли, они становятся твердыми и принимают форму поверхности, чтобы обеспечить прочную опору. Когда они движутся, ноги разжимаются и расслабляются между шагами, и опорные конструкции используются для того, чтобы помочь им оставаться гибкими при зажиме.
Эти гибкие ноги были первыми, которые были протестированы на неровных поверхностях.

Исследователи установили ноги на гексаподный робот и разработали и построили бортовую систему. Бортовая система способна генерировать отрицательное давление и положительное давление, чтобы разжимать и зажимать ноги между каждым шагом. Чтобы зажать ноги, вакуумный насос удаляет воздух между кофейной гущей. Они также могут быть пассивно зажаты, если вес робота выталкивает воздух из между кофейной гущей.
Неровные поверхности
Робот был протестирован на различных поверхностях, включая ровную землю, древесные щепки и гальку, с гибкими ногами и без них. Результаты показали, что пассивный зажим наиболее эффективен на ровной земле, а активный зажим – на рыхлых камнях.
С гибкими ногами ноги робота могли лучше сцепляться с землей, что увеличивало его скорость. Это было особенно верно, когда робот шел по наклонной и неровной местности.
Ник Грейвис – профессор кафедры механической и аэрокосмической инженерии в UC Сан-Диего и соавтор исследования.
«Природный мир полон сложных поверхностей для ходьбы роботов – скользкие, каменистые и мягкие субстраты делают ходьбу сложной», – сказал Грейвис. «Ноги, которые могут адаптироваться к этим разным типам поверхности, могут помочь роботам улучшить мобильность».
Исследователи теперь попытаются включить мягкие датчики на дно ног, что позволит использовать электронную систему управления. Электронная система управления сможет определить тип поверхности, по которой робот будет ходить, и нужно ли зажимать ноги активно или пассивно. Исследователи также продолжат улучшать конструкцию и алгоритмы управления для лучшей эффективности.












