Робототехника
Исследователи создают коллективы микророботов, которые двигаются в желаемом порядке
Группа исследователей из различных учреждений, включая Институт интеллектуальных систем Макса Планка (MPI-IS), Корнельский университет и Шанхайский университет Цзяо Тонг, разработала коллективы микророботов, которые могут двигаться в любом желаемом направлении.
Исследованием руководили Гаурав Гарди и профессор Метин Ситти из MPI-IS, Стивен Серон и профессор Кирстин Петерсон из Корнелла, а также профессор Вендун Ван из Шанхайского университета Цзяо Тонг.
Исследование под названием «Коллективы микророботов с реконфигурируемой морфологией, поведением и функциями»Была опубликована в Природа связи.
Изменение конфигурации миниатюрных частиц
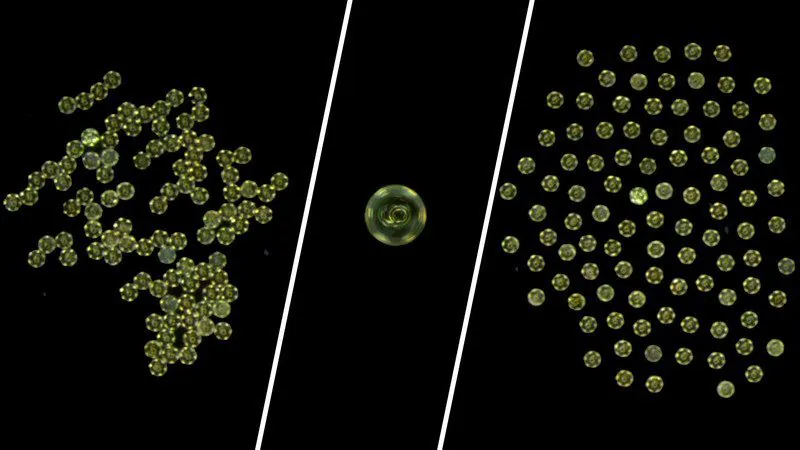
Миниатюрные частицы способны очень быстро перенастроить поведение роя. Плавая на поверхности воды, диски микророботов могут двигаться по кругу, танцевать, распространяться, как газ, собираться вместе или образовывать прямую линию.
Каждый отдельный робот немного больше ширины человеческого волоса, и они печатаются на 3D-принтере с использованием полимера, а затем покрываются тонким верхним слоем кобальта. Металл дает микророботам возможность становиться миниатюрными магнетиками, а проволочные катушки создают магнитное поле, когда через них проходит электричество. Это магнитное поле позволяет частицам точно перемещаться по бассейну с водой шириной в один сантиметр.
Впечатляющим примером этого является то, что роботы выстраиваются в линию, которую исследователи затем могут перемещать, чтобы «писать» буквы в воде.
На развитие роевой робототехники влияет коллективное поведение и модели роя в природе, такие как стая птиц. Популярность реализации роевого поведения робототехники в последнее время резко возросла.
Однако, когда отдельная частица слишком мала для вычислений или робот имеет ширину всего 300 микрометров, его нельзя запрограммировать с помощью алгоритма. Чтобы компенсировать это, исследователи должны полагаться на три разные силы. Первая — это магнитная сила, которая возникает, когда два магнита с противоположными полюсами притягиваются или два одинаковых полюса отталкивают друг друга.
Вторая сила — это жидкая среда или вода вокруг дисков. Это можно увидеть, когда частицы плавают в водовороте воды, что приводит к вытеснению воды и изменению других окружающих частиц. Скорость завихрения и магнетит определяют, как взаимодействуют частицы.
Третья сила включает в себя две частицы, плавающие рядом друг с другом, что часто приводит к их дрейфу навстречу друг другу. Поверхность воды изгибается таким образом, что они сближаются.
Управление роботами
Исследователи использовали все три эти силы для создания коллективной и скоординированной схемы движения десятков микророботов как единой системы. Ученые могут управлять роботами через паркур, показывая форму, которая лучше всего подходит для данного препятствия. Например, микророботы выстроятся в один ряд, чтобы пройти через узкий проход.
Роботы могут достигать нескольких различных режимов передвижения и формаций, что достигается за счет внешних вычислений. Алгоритм запрограммирован на создание магнитного поля, вращающегося или колеблющегося, и это вызывает желаемое движение роботов.
Гаурав Гарди - доктор философии. студентка факультета физической разведки MPI-IS. Он является одним из ведущих авторов исследования вместе со Стивеном Сероном.
«В зависимости от того, как мы меняем магнитные поля, диски ведут себя по-разному», — говорит Гаурав Гарди. «Мы настраиваем одну силу, а затем другую, пока не получим желаемое движение. Если мы вращаем магнитное поле внутри катушек слишком сильно, сила, заставляющая воду двигаться вокруг, становится слишком большой, и диски расходятся друг от друга. Если мы будем вращаться слишком медленно, то эффект cheerio, который притягивает частицы, будет слишком сильным. Нам нужно найти баланс между этими тремя».
Исследователи в этой области также работают над тем, чтобы сделать эти типы коллективов микророботов еще меньше.
«Наше видение состоит в том, чтобы разработать еще более крошечную систему, состоящую из частиц размером всего в один микрометр. Эти коллективы потенциально могут проникать внутрь человеческого тела и перемещаться по сложным средам, чтобы доставлять лекарства, например, блокировать или разблокировать проходы или стимулировать труднодоступную область», — говорит Гарди.
Метин Ситти возглавляет отдел физической разведки.
«Коллективы роботов с надежными переходами между моделями передвижения очень редки. Однако такие универсальные системы выгодны для работы в сложных условиях. Мы очень рады, что нам удалось разработать такой надежный и реконфигурируемый по требованию коллектив. Мы рассматриваем наше исследование как план будущих биомедицинских приложений, минимально инвазивных методов лечения или восстановления окружающей среды», — говорит Метин Ситти.
