Robótica
Robôs Andam Mais Rápido Com Pés Flexíveis Recém-Desenvolvidos
Roboticistas da Universidade da Califórnia em San Diego desenvolveram pés flexíveis para robôs. A nova tecnologia pode resultar em robôs que andam 40 por cento mais rápido em terrenos irregulares, como seixos e lascas de madeira.
O novo desenvolvimento é importante para uma variedade de aplicações diferentes, especialmente missões de busca e resgate.
A pesquisa será apresentada na conferência RoboSoft, que será virtual e ocorrerá entre 15 de maio e 15 de julho de 2020.
Emily Lathrop é uma aluna de doutorado na Jacobs School of Engineering da UC San Diego e a primeira autora do artigo.
“Os robôs precisam ser capazes de andar rápido e eficientemente em terrenos naturais e irregulares para que possam ir a todos os lugares que os humanos podem ir, mas talvez não devam”, disse Lathrop.
Michael T. Tolley é um professor no Departamento de Engenharia Mecânica e Aeroespacial da UC San Diego. Ele é o autor sênior do artigo.
“Normalmente, os robôs só são capazes de controlar o movimento em juntas específicas”, disse Tolley. “Neste trabalho, mostramos que um robô que pode controlar a rigidez e, portanto, a forma de seus pés supera os designs tradicionais e é capaz de se adaptar a uma ampla variedade de terrenos.”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Pés Robóticos Flexíveis
Os pés robóticos flexíveis consistem em uma membrana de látex preenchida com grãos de café. Os grãos de café são capazes de ir e vir entre atuar como um sólido e um líquido. O mecanismo que permite que os meios granulares, como os grãos de café, ajam dessa forma é chamado de bloqueio granular. Como resultado, os robôs podem andar mais rápido e ter uma melhor aderência.
À medida que os pés do robô tocam o chão, eles se tornam firmes e se conformam à superfície para estabelecer uma base sólida. Quando se movem, os pés se desbloqueiam e se soltam entre os passos, e as estruturas de suporte são utilizadas para ajudá-los a permanecer flexíveis enquanto bloqueados.
Esses pés flexíveis foram os primeiros do seu tipo a serem testados em superfícies irregulares.

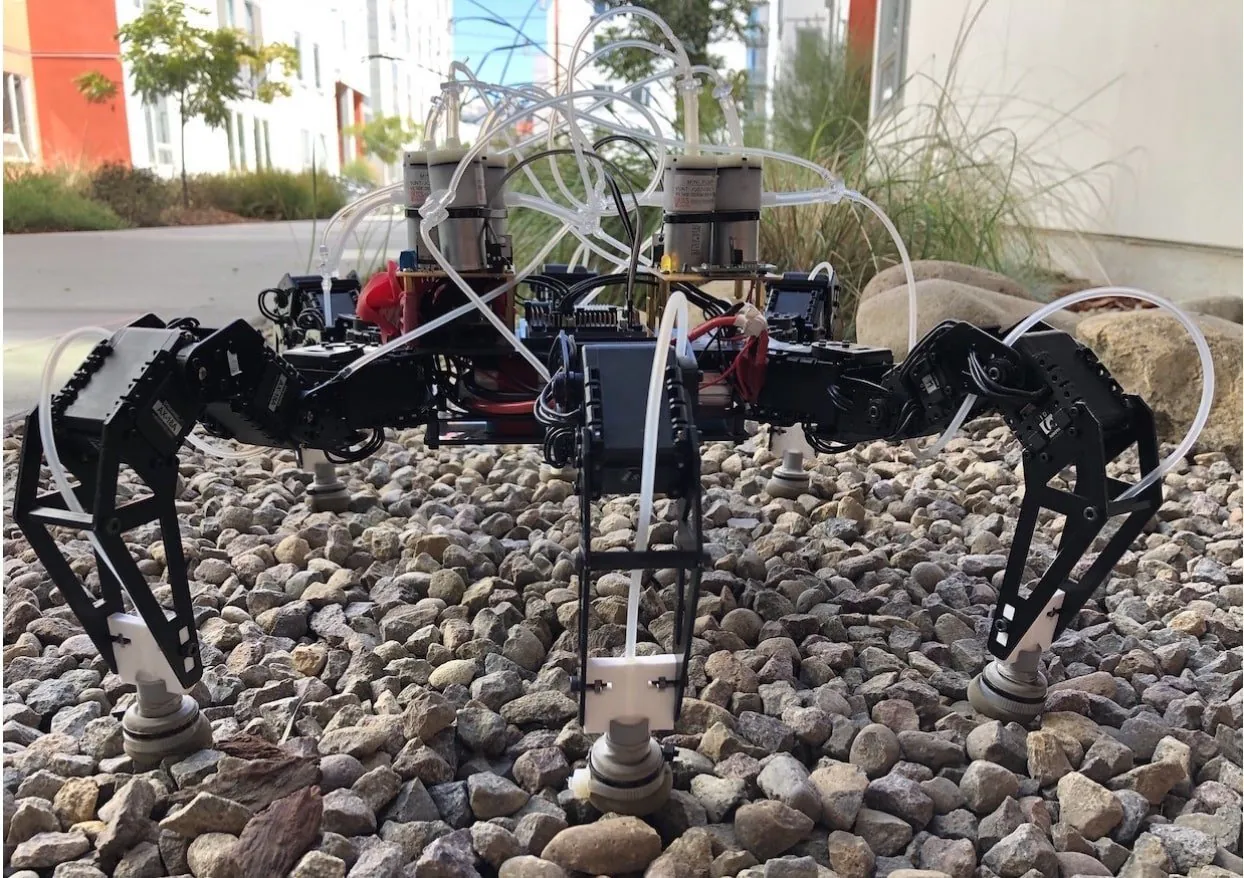
Os pesquisadores instalaram os pés em um robô hexapodal e projetaram e construíram um sistema a bordo. O sistema a bordo é capaz de gerar pressão negativa e pressão positiva para desbloquear e bloquear os pés entre cada passo. Para bloquear os pés, uma bomba de vácuo remove o ar entre os grãos de café. Eles também podem ser bloqueados passivamente se o peso do robô forçar o ar para fora dos grãos de café.
Superfícies Irregulares
O robô foi testado andando em uma variedade de superfícies diferentes, incluindo chão plano, lascas de madeira e seixos, com e sem os pés flexíveis. As descobertas foram que o bloqueio passivo é mais eficaz em chão plano e o bloqueio ativo é melhor em rochas soltas.
Com os pés flexíveis, as pernas do robô foram capazes de agarrar o chão melhor, o que por sua vez aumentou sua velocidade. Isso foi especialmente verdadeiro quando o robô andou em terrenos inclinados e irregulares.
Nick Gravish é um professor no Departamento de Engenharia Mecânica e Aeroespacial da UC San Diego e coautor do estudo.
“O mundo natural está cheio de terrenos desafiadores para robôs que andam — superfícies escorregadias, rochosas e moles tornam a caminhada complicada”, disse Gravish. “Pés que possam se adaptar a esses diferentes tipos de solo podem ajudar os robôs a melhorar a mobilidade.”
Os pesquisadores agora tentarão incorporar sensores macios na parte inferior dos pés, o que permitirá que uma placa de controle eletrônica seja utilizada. A placa de controle eletrônica identificaria o tipo de solo que o robô está prestes a caminhar e se os pés precisam ser bloqueados ativa ou passivamente. Os pesquisadores também continuarão a melhorar os algoritmos de design e controle para uma melhor eficiência.












