Robotyka
Roboty chodzą szybciej z nowo opracowanymi elastycznymi stopami
Roboticzyści z Uniwersytetu Kalifornijskiego w San Diego opracowali elastyczne stopy dla robotów. Nowa technologia może spowodować, że roboty będą chodzić o 40 procent szybciej na nierównych powierzchniach, takich jak kamienie i wióry drzewne.
Nowy rozwój jest ważny dla różnych aplikacji, zwłaszcza misji poszukiwawczo-ratunkowych.
Badania zostaną przedstawione na konferencji RoboSoft, która odbędzie się wirtualnie między 15 maja a 15 lipca 2020 roku.
Emily Lathrop jest doktorantką w Jacobs School of Engineering na UC San Diego i pierwszym autorem pracy.
“Roboty muszą być w stanie szybko i efektywnie chodzić po naturalnych, nierównych powierzchniach, aby mogły iść wszędzie, gdzie ludzie mogą iść, ale może nie powinni,” powiedziała Lathrop.
Michael T. Tolley jest profesorem w Wydziale Inżynierii Mechanicznej i Lotniczej na UC San Diego. Jest senior autorem pracy.
“Zwykle roboty są w stanie kontrolować ruch tylko w określonych stawach,” powiedział Tolley. “W tej pracy pokazaliśmy, że robot, który może kontrolować sztywność, a tym samym kształt, swoich stóp, przewyższa tradycyjne projekty i jest w stanie dostosować się do szerokiej gamy powierzchni.”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Elastyczne stopy robota
Elastyczne stopy robota składają się z membrany lateksowej wypełnionej ziarnami kawy. Ziarna kawy mogą przechodzić między stanem stałym a ciekłym. Mechanizm, który pozwala na takie zachowanie się ziaren, nazywa się zablokowaniem ziaren. W efekcie roboty mogą chodzić szybciej i mają lepszą przyczepność.
Gdy stopy robota dotykają podłoża, stają się twarde i dostosowują się do powierzchni, aby uzyskać stabilne podparcie. Gdy się poruszają, stopy rozluźniają się i tracą sztywność między krokami, a struktury nośne pomagają im utrzymać elastyczność podczas zablokowania.
Te elastyczne stopy były pierwszymi, które zostały przetestowane na nierównych powierzchniach.

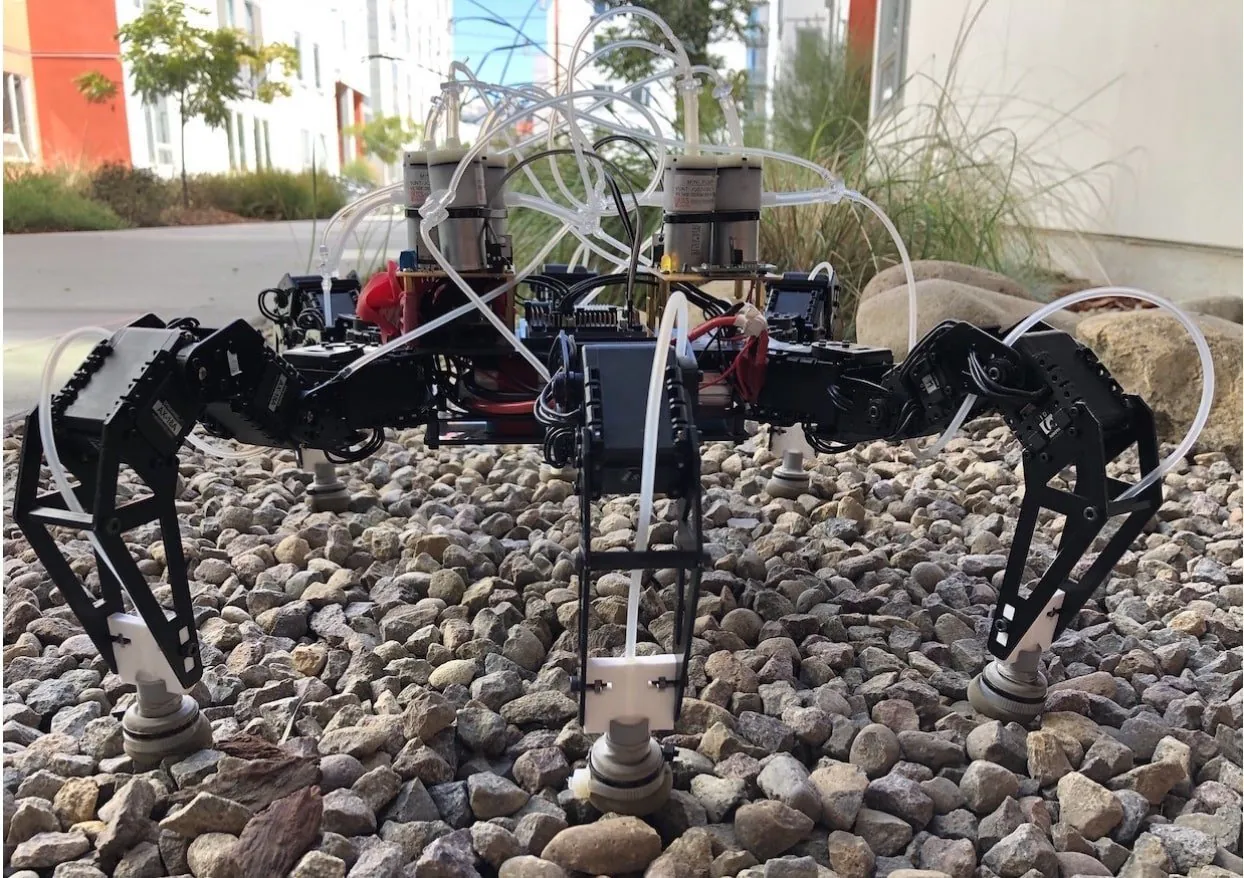
Badacze zainstalowali stopy na robocie sześcionożnym i zaprojektowali oraz zbudowali system pokładowy. System pokładowy jest w stanie generować ujemne i dodatnie ciśnienie w celu rozluźnienia i zablokowania stóp między każdym krokiem. Aby zablokować stopy, pompa próżniowa usuwa powietrze między ziarnami kawy. Mogą one również być biernie zablokowane, jeśli ciężar robota wypycha powietrze z między ziaren.
Nierówne powierzchnie
Robot został przetestowany podczas chodzenia na różnych powierzchniach, w tym na płaskim podłożu, wiórach drzewnych i kamieniach, z i bez elastycznych stóp. Wyniki pokazały, że bierny zblokowanie jest najbardziej skuteczne na płaskim podłożu, a aktywne zablokowanie jest najlepsze na luźnych kamieniach.
Z elastycznymi stopami nogi robota mogły lepiej trzymać się podłoża, co zwiększyło jego prędkość. Było to szczególnie widoczne, gdy robot szedł po nachylonych i nierównych powierzchniach.
Nick Gravish jest profesorem w Wydziale Inżynierii Mechanicznej i Lotniczej na UC San Diego i współautorem pracy.
“Świat naturalny jest pełen trudnych powierzchni do chodzenia robotów – śliskie, kamieniste i miękkie podłoża wszystkie utrudniają chodzenie,” powiedział Gravish. “Stopy, które mogą dostosować się do tych różnych typów podłoża, mogą pomóc robotom poprawić mobilność.”
Badacze będą teraz próbowali zintegrować miękkie sensory na dolnej części stóp, co pozwoli na użycie płyty sterującej. Płyta sterująca będzie w stanie rozpoznać typ podłoża, po którym robot będzie chodził, i czy stopy muszą być aktywnie lub biernie zablokowane. Badacze będą również kontynuować udoskonalanie algorytmów projektowych i sterujących w celu poprawy wydajności.












