ロボティクス
ロボットが人間の動作を観察して学習する方法が可能に
カーネギーメロン大学(CMU)の研究者によって開発された新しい学習方法により、ロボットは人間の動作を直接観察して学習し、新しいタスクにその知識を応用することができる。これにより、ロボットは家事を学習することができる。この学習方法はWHIRL(In-the-wild Human Imitating Robot Learning)と呼ばれ、ロボットはタスクを観察し、ビデオデータを収集して最終的にタスクを完了する方法を学習することができる。
この研究は、ニューヨークで開催されたロボティクス:サイエンス・アンド・システムズ会議で発表された。
模倣による学習
シカール・バールは、カーネギーメロン大学のロボティクス研究所(RI)の博士課程の学生である。
「模倣は学習するための優れた方法です」とバールは言った。「ロボットが人間の動作を直接観察して学習することは、まだ解決されていない問題ですが、この研究はその能力を実現するための重要なステップです。」
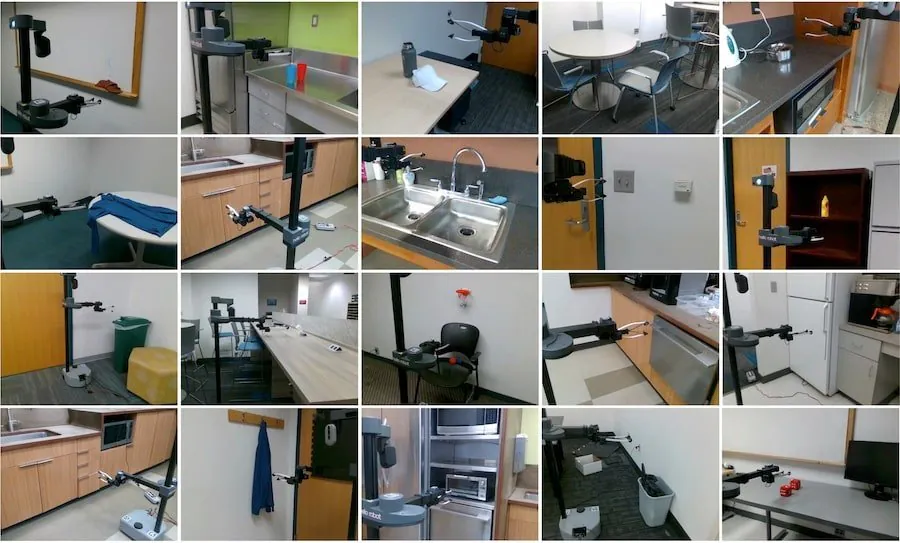
バールは、ディパック・パタクとアブヒナブ・グプタと共同で研究を行った。パタクとグプタは両者ともRIの教員である。研究チームは、オフザシェルフのロボットにカメラとソフトウェアを追加し、20以上のタスクを学習させることができた。これらのタスクには、家電の開閉やごみ袋の取り出しなどが含まれた。ロボットは、人間がタスクを完了するのを観察した後、自分で試みることになった。
パタクはRIの助教授である。
「この研究は、ロボットを家庭に導入する方法を示しています」とパタクは言った。「ロボットをプログラムしたり、タスクを成功裏に完了するまで訓練したりするのを待つのではなく、この技術により、ロボットを家庭に導入し、タスクを学習させることができます。ロボットは、環境に適応し、人間の動作を観察することで改善されます。」
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRLと現在の方法の比較
ロボットにタスクを教えるための現在の方法のほとんどは、模倣学習または強化学習に頼っています。模倣学習では、人間がロボットを操作してタスクを教えますが、これには複数回の試行が必要です。強化学習では、ロボットは通常、シミュレーションで数百万の例を訓練してから、実世界に適用します。
これらのモデルは、構造化された環境で単一のタスクを教えるには効率的ですが、拡張して適用することは難しいです。しかし、WHIRLでは、ロボットは人間がタスクを完了するビデオから学習できます。また、拡張性が高く、特定のタスクに限定されず、家庭環境で動作することができます。
WHIRLにより、ロボットは自然な環境でタスクを完了することができます。初期の試行は失敗に終わることが多いですが、数回の成功後には急速に学習することができます。ロボットは、人間と同じ動作でタスクを完了するとは限りませんが、それはロボットの部品が人間と異なるためです。しかし、タスクを完了する結果は常に同じです。
「ロボティクスを野外で拡張するには、データが信頼性が高く安定している必要があり、ロボットは独自の練習によって環境に適応して改善される必要があります」とパタクは言った。
