ロボティクス
フレキシブルロボットアームをARゴーグルで操作
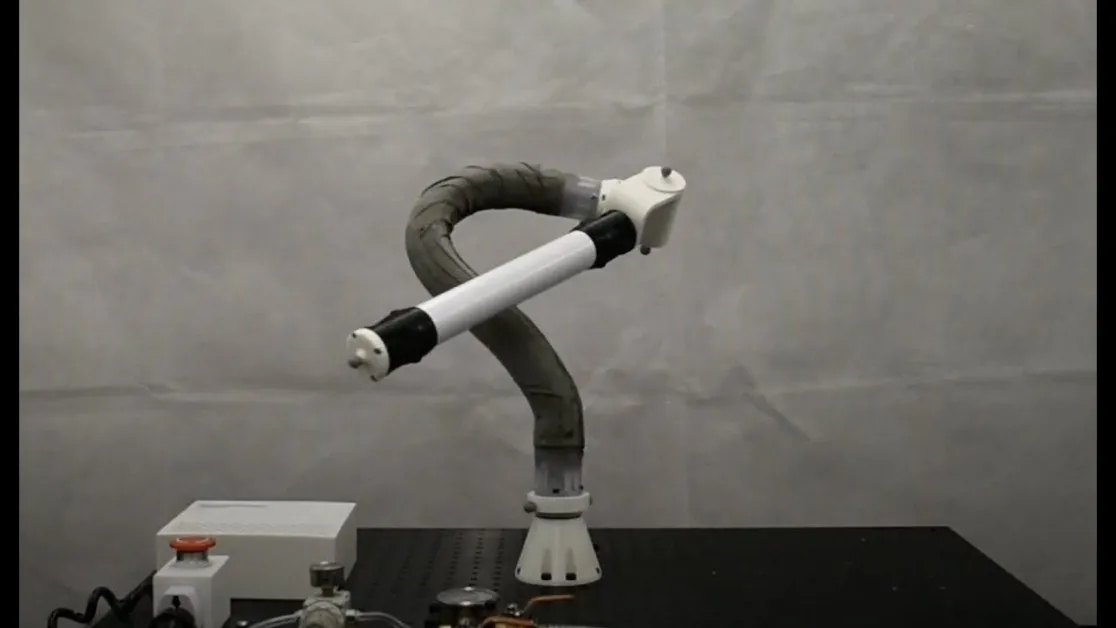
イギリスのインペリアル・カレッジ・ロンドンの研究者は、増強現実(AR)ゴーグルを使用して操作できるフレキシブルロボットアームを開発しました。この高度にカスタマイズ可能なロボットアームは、すべての方向に曲げて回すことができ、宇宙船のメンテナンス、製造、けがのリハビリテーションなどの分野で使用できます。
ユーザーは、ロボットのアームを手動で各タスクに必要な形に曲げることができ、これは内部にあるマイラーシートの層によって可能です。各マイラーシートは互いにスライドし、ロックすることができます。ただし、一部のユーザーは、ガイダンスなしでロボットを曲げるのに苦労しています。
AR技術の実装
これらの課題を克服するために、インペリアルのREDS(ロボット操作:エンジニアリング、デザイン、サイエンス)ラボの研究者チームは、ユーザーがARに頼ってロボットを構成できるようにシステムを設計しました。混合現実スマートグラスとモーショントラッキングカメラを使用して、ユーザーはテンプレートとデザインを現実世界の環境に重ね合わせたものを提示されます。ロボットアームは次にテンプレートに合わせて調整できます。さらに、テンプレートは成功した構成時に緑色になり、ロボットはロックされます。
インペリアルのダイソン・スクール・オブ・デザイン・エンジニアリングのニコラス・ロハス博士は、研究論文の筆頭著者です。
「これらのロボットを調整する際の主要な問題は、新しい位置での精度です。私たち人間は、新しい位置がテンプレートと一致することを確認するのが得意ではありません。したがって、ARに助けを求めることにしました」とロハス博士は述べました。
「私たちは、ARが私たちの可塑性ロボットと共に作業を簡素化できることを実証しました。このアプローチにより、ユーザーは、技術的な専門知識が必要なく、多種多様なアプリケーションに対して、簡単にロボットの位置を生成できます」
システムのテストと適用
このシステムは、ロボティクス経験があるが可塑性ロボットの操作経験がない20~26歳の5人の男性を対象にテストされました。公開された論文によると、彼らは新しいシステムを使用してロボットを成功的に、正確に調整することができました。
このようなシステムには、製造や車両メンテナンスなどの多くの用途があります。アームの軽量化により、特に宇宙船のメンテナンスに適しています。また、その優しさにより、けがのリハビリテーションにも使用できます。
アレックス・ランネとアンガス・クラークの博士課程の研究者は、共同の第一著者です。
「多くの点で、切り離された、より柔軟な第三の腕と見ることができます。余分な負担を分担するのに役立つ可能性があり、作業負荷を分散させるのに役立ちます」という2人は述べました。
研究者は、ロボットとそのARを改良し続け、タッチとオーディオ要素を導入してロボットの精度を高めることを目指しています。もう1つの重要な目標は、ロボットを強化することです。ロボットは、ロックされた位置でより柔軟になります。これらの特性は、精度と正確性の両方に影響を及ぼす可能性があります。
