Robotika
Roboti chodí rychleji s nově vyvinutými flexibilními nohama
Robotici na University of California San Diego vyvinuli flexibilní nohy pro roboty. Nová technologie může vést k tomu, že roboti budou chodit o 40 procent rychleji na nerovných površích, jako jsou kameny a dřevěné štěpky.
Tento nový vývoj je důležitý pro řadu různých aplikací, zejména pro mise hledání a záchrany.
Výzkum bude prezentován na konferenci RoboSoft, která se bude konat virtuálně mezi 15. květnem a 15. červencem 2020.
Emily Lathrop je doktorandka na Jacobs School of Engineering na UC San Diego a první autorka článku.
“Roboti potřebují být schopni chodit rychle a efektivně na přírodních, nerovných površích, aby mohli jít všude, kam mohou lidé, ale možná by neměli,” řekla Lathrop.
Michael T. Tolley je profesor na katedře mechanického a aerokosmického inženýrství na UC San Diego. Je senior autorem článku.
“Obvykle jsou roboti schopni ovládat pohyb pouze v určitých kloubech,” řekl Tolley. “V této práci jsme ukázali, že robot, který může ovládat tuhost a tvar svých nohou, překonává tradiční návrhy a je schopen přizpůsobit se širokému spektru terénů.”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Flexibilní robotické nohy
Flexibilní robotické nohy se skládají z latexové membrány, která je naplněna kávovými zrny. Kávová zrna jsou schopna přecházet mezi pevným a kapalným stavem. Mechanismus, který umožňuje granulárním médiím, jako jsou kávová zrna, chovat se tímto způsobem, se nazývá granulární zablokování. V důsledku toho mohou roboti chodit rychleji a mít lepší záběr.
Když robotické nohy dopadnou na zem, stanou se pevnými a přizpůsobí se povrchu, aby vytvořily pevný základ. Když se pohybují, nohy se rozblokují a uvolní mezi kroky a podpůrné struktury se spoléhají na to, aby zůstaly flexibilní, zatímco jsou zablokované.
Tyto flexibilní nohy byly první svého druhu, které byly testovány na nerovných površích.

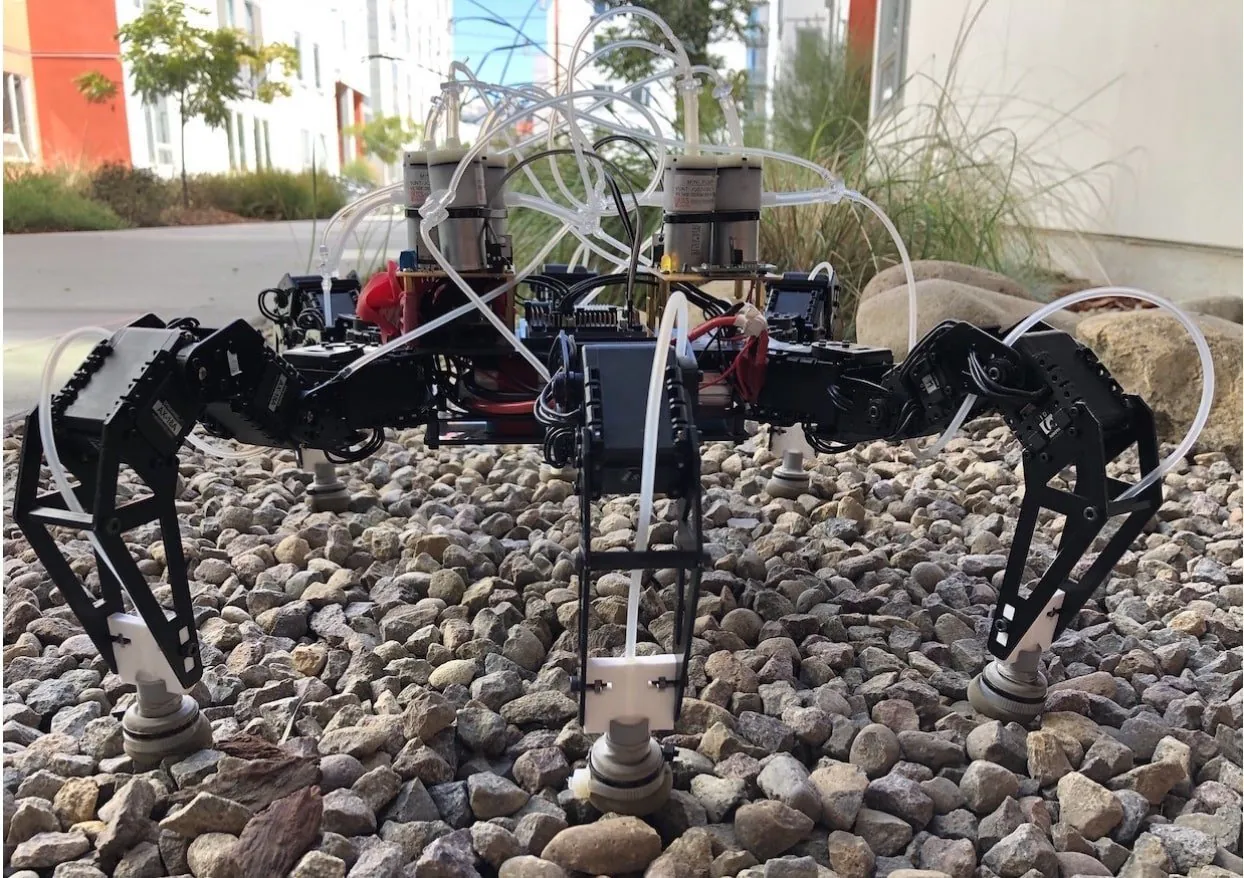
Vědci nainstalovali nohy na hexapod robota a navrhli a postavili systém na palubě. Systém na palubě je schopen generovat negativní a pozitivní tlak, aby rozblokoval a zablokoval nohy mezi každým krokem. Pro zablokování nohou je vakuum čerpadlo odstraněno vzduch mezi kávovými zrny. Mohou být také pasivně zablokovány, pokud váha robota vytlačí vzduch z mezi kávových zrn.
Nerovné povrchy
Robot byl testován na chůzi na různých površích, včetně rovné země, dřevěných štěpků a kamenů, s a bez flexibilních nohou. Zjištění byla, že pasivní zablokování je nejúčinnější na rovné zemi a aktivní zablokování je nejlepší na volných skalách.
S flexibilními nohama byly nohy robota schopny lépe zachytit zem, což zvýšilo jeho rychlost. To bylo especialmente pravdivé, když robot šel po svahu a nerovném terénu.
Nick Gravish je profesor na katedře mechanického a aerokosmického inženýrství na UC San Diego a spoluautor studie.
“Přírodní svět je plný složitých povrchů pro chůzi robotů – kluzké, skalnaté a měkké substráty všechny činí chůzi komplikovanou,” řekl Gravish. “Nohy, které mohou přizpůsobit se těmto různým typům povrchu, mohou pomoci robotům zlepšit mobilitu.”
Vědci se nyní pokusí začlenit měkké senzory na spodní straně nohou, které umožní použít elektronickou řídicí desku. Elektronická řídicí deska by identifikovala typ povrchu, po kterém robot bude chodit, a zda nohy potřebují být aktivně nebo pasivně zablokovány. Vědci budou také pokračovat v zlepšování návrhu a algoritmů pro lepší efektivitu.












