Robotik
AI Destekli Arama ve Kurtarma Ekipmanlarına Sahip Bir Hamam Böceği
Uluslararası robotik araştırmacılar, bir ‘yönlendirilebilen’ canlı hamam böceğinin, miniaturize edilmiş bir makine öğrenimi etkinleştirilmiş infrared hayatta kalan algılama sistemini, diğer türlü geçilemeyen felaket senaryolarına taşımak için kullandığı bir Urban Search And Rescue (USAR) sistemi geliştirdiler.
Sistem, Singapur, Çin, Almanya ve İngiltere’deki araştırma bölümlerinin bir işbirliğidir. Sistem, Madagascar hamam böceğini bir araç olarak kullanmakta ve birkaç saat boyunca çalışacak kadar güce sahiptir.

Kaynak: https://arxiv.org/abs/2105.10869
Melez kurtarma sistemi, insan algılama için bir makine öğrenimi modeli kullanır ve mobil IR algılama sistemini çalıştırır, bu sistem gerektiğinde özerk olarak çalışabilir ve bulunan hayatta kalanları bir temel işletim istasyonuna raporlayabilir.
Sınırlı Yerel Kaynaklar
Makine öğrenimi çerçevesi, olağanüstü ince kaynaklarda çalışmak zorundadır: yalnızca 191.8kB statik RAM ve 1988kB Flash belleği, cihazın genel güç gereksinimlerinden sistem için bırakılmıştır ve bu, böceğe elektriksel uyarı sağlamak için de zorunludur.

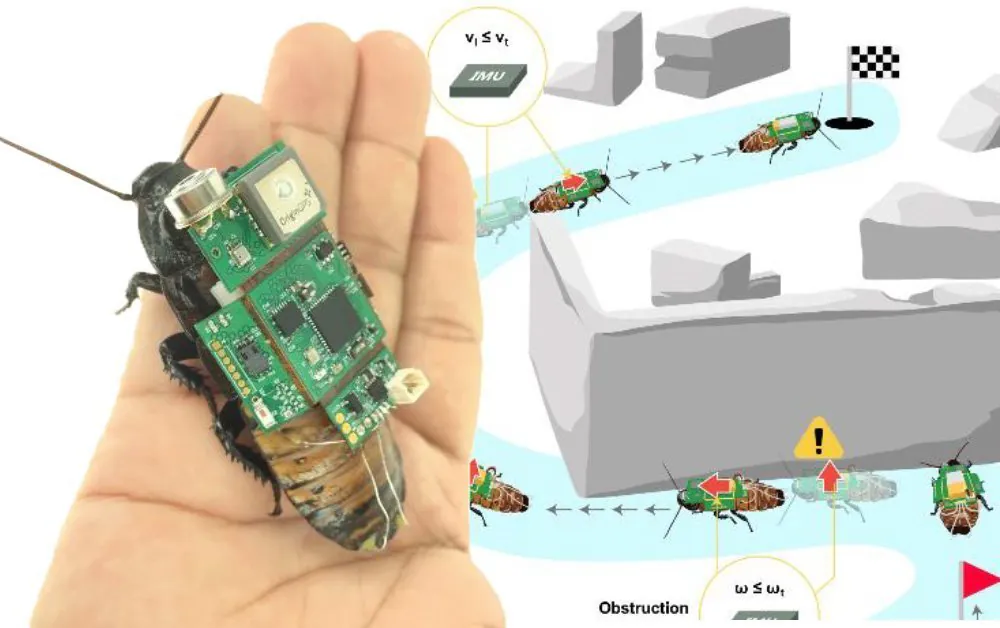
Hamam böceğinin sırt çantasının üç işlevsel bloğu, yukarıda resmedildiği gibi, kablosuz uyarı, birincil kontrol birimi ve çevre bileşenlerini içerir, IR türetilen makine öğrenimi sistemi ve navigasyon işlevselliği birincil kontrol birimi içine gömülüdür. Devrenin devresi, hamam böceğinin geometrisine daha iyi uyması için birkaç bileşene ayrılmıştır.
Madagascar hamam böceği (dünyadaki en büyük türlerden biri, 15g maksimum yük kapasitesine sahiptir), dört elektrodun antennelerine (cerci) ve karın bölgesine yerleştirilmesiyle küçük elektrik şokları ile bir yöne veya diğerine yönlendirilir, elektrodlar balmumları ile sabitlenmiştir.
Haşere Arama ve Kurtarma’ya AI Eklemek
Yeni girişim, UC Berkeley ve Singapur’un Nanyang Teknoloji Üniversitesi’nden önceki çalışmalara dayanmaktadır, bu çalışmalarda ilk olarak USAR senaryolarında yönlendirilebilen böceklerin kullanılması düşünülmüştür.

2016 yılında bir böceğin uçuş yolunun kontrolü üzerine yapılan araştırma. Kaynak: https://www.youtube.com/watch?v=iljHXpE4LG8
Böceklerin uçuş yeteneği olmasına rağmen, yük kapasiteleri buna göre azaltılır, bu da borda teknolojilerinin potansiyel yeteneklerini düşürür ve özellikle bir makine öğrenimi algoritmasını çalıştırmak gerekli olduğunda güç tüketimini kritik bir seviyeye getirir.
Bordaki özerk insan tanıma sistemi, bir görüntü sınıflandırma modeli kullanır, bu model destek vektör makineleri (SVM) ve Yönlendirilmiş Gradient Histogramı kullanır.
Hamam böceğinin hareketi, entegre navigasyon sistemi tarafından yönetilir ve ‘biobot’u önceden belirlenmiş bir varış noktasına yönlendirir, aradaki engeller hakkında herhangi bir bilgiye gerek kalmaz. Çoğu durumda, hamam böceğinin kendi güçlü navigasyon becerileri, ulaşılması otherwise ulaşılamayan bir konuma ulaşma sorunlarının çoğunu çözer.

Kaynak: https://arxiv.org/abs/2105.10869
Bordaki infrared sistemi, 1hz’de görüntü yakalar, karanlık alanlarda başarılı bir şekilde çalışır ve bulunan hayatta kalanları kablosuz olarak gerçek zamanlı olarak bir komuta merkezine raporlar. Enerji tasarrufu için, görüntü analiz sistemi yalnızca pozitif bir infrared okuması tetiklenirse çalışmaya başlar.
Model, yalnızca 18.3kB Flash belleği ve 52.2kB statik RAM işgal eder, 95 milisaniyelik bir hesaplama zamanı gerçekleştirir. Makul bir işlem zamanı, bir USAR senaryosunda çok önemlidir, çünkü uzak infrared imzaları, hamam böceği yön değiştirdiğinde ve araziyi geçerken işleme aralığında kaçırılabilir.
Sistem ayrıca, olası bir kurtarma girişimi için yerel koşulları raporlamak ve kontrol merkezini, böceği tehlikeye atan herhangi bir durumdan uzaklaştırmak için sıcaklık, nem ve CO2’yi izlemek için sensörler de içerir.
Simüle Edilmiş Arazilerde Test Edilmesi
Sistem, bir simüle edilmiş felaket senaryosunda (yukarıdaki resim) test edildi, engelleri etkili bir şekilde aşadı, ancak özellikle dik tırmanmalar içeren belirli zorlu konfigürasyonlarda, hamam böceği ekli ekipman nedeniyle ağırlık dezavantajına sahipti.

Navigasyon mimarisi, başlangıçta aşırı engellerde, hatta hamam böceğinin ilerleyemeyeceği durumlarda sıkışmaya eğilimlidir ve araştırmacılar, performansı yüksek engeller karşısında iyileştirmek için bir öngörülü geri bildirim navigasyon sistemi geliştirdiler. Sistem, engelsiz veya düşük engelli ortamlarda %100’lük bir başarı oranı elde edebildi ve yüksek engelli ortamlarda daha yüksek bir başarı oranı elde etti.
Başarısızlık meydana geldiğinde, araştırmacılar, bunun, deney süresini artırarak giderilebileceğini, ancak bu durumun, zaman kritik bir USAR senaryosunda mantıksal sonuçları olacağını belirtiyorlar.
Infrared Görünüm
Bordaki infrared kamera, 32×32 pikselde ve 90 derecelik görüş açısında çalışır. Görüntüler, tetiklendiğinde, bir median gürültü filtresinden geçirilir.
Sistem, insan konularını diğer tür termal imzalardan ayırt etmekte %87’lik bir başarı oranı elde eder, 0.5m ve 1.5m yakınlık yarıçapında %90’a çıkar.
Enerji ve yonga boyutu kısıtlamaları nedeniyle, ilk çalışma, borda bir yerelleştirme sistemi içermez, bu nedenle hamam böceğinin konumunu gerçek zamanlı olarak izlemek mümkün değildir. Araştırmacılar, gelecekteki uygulamalarda, düşük enerji konum sinyallerinin kontrol merkezine iletilmesi ile birlikte ölü hesaplamasının uygulanabileceğini öneriyorlar.
Arama ve Kurtarma Operatörleri Olarak Haşereler
Son on yıl, arama ve kurtarma senaryoları için hibrit veya saf robotik sistemler oluşturmak amacıyla haşerelerin dayanıklılığı ve navigasyon gücünden yararlanmaya yönelik bir dizi araştırma projesini görüştürdü. Bu son girişimden önce, 2016 yılında böceklerle ilgili yapılan çalışmaya ek olarak, böcek benzeri yetenekleri saf robotik formda yeniden yaratma girişimleri yapıldı.
Bunlar arasında, 2019 yılında UoC’den bir araştırma projesi yer alıyor, bu proje, hamam böceğinin prensiplerine dayanan, robotik haşerelerin aşırı kırılganlığını ele alan ilk projelerden biri olan, ergonomik olarak basit bir robottan oluşuyor.












