
Nadzor
Prepoznavanje voznikove zlorabe mobilnega telefona s polarizirajočimi filtri in prepoznavanjem predmetov

Raziskovalci iz Združenega kraljestva so predlagali obcestni sistem za avtomatsko odkrivanje nezakonite uporabe mobilnih telefonov med vozniki z uporabo klasičnih fotooptičnih filtrov in infrardečega zajema. Odvisno od kakovosti opreme za zajem je sistem pokazal stopnjo natančnosti do 95.81 % v poskusih v resničnem svetu.
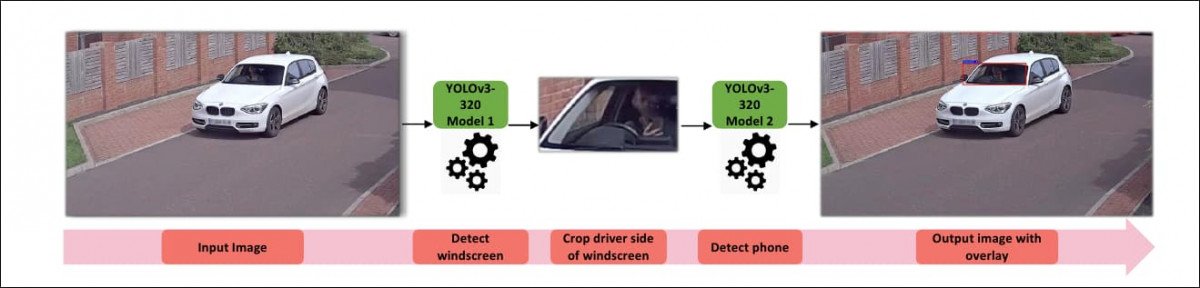
Eden od modelov raziskovalcev v akciji. Območje vetrobranskega stekla je najprej identificirano in izolirano kot območje zbiranja za iskanje slik mobilnega telefona s pomočjo umetne inteligence. Sistem je zasnovan tako, da ignorira nameščene mobilne telefone in išče naprave, ki jih voznik aktivno drži. Vir: https://www.youtube.com/watch?v=PErIUr3Cxvg
O Raziskave je naslovljen Identifikacija kršitev uporabe voznikovega telefona prek najsodobnejšega zaznavanja predmetov s sledenjem, in prihaja iz šole za računalništvo na univerzi Newcastle.
Premagovanje odsevnosti vetrobranskih stekel
Predhodne pristope k zaznavanju uporabe mobilnih naprav med vozniki je ovirala visoka odsevnost vetrobranskih stekel podnevi, ki se je poslabšala, ko odsevi iz skupin velikih oblakov dodatno zakrijejo notranjost vozila. Takšnih primerov realno ni mogoče rešiti z viri infrardeče svetlobe, saj bi količina IR svetlobe, ki je potrebna za prodor naravne dnevne svetlobe, zahtevala veliko virov.
Zato raziskovalci iz Newcastla predlagajo najstarejši trik v knjigi (iz leta 1812) za odpravo odsevov z zaznane steklene površine – poceni, fizično polarizirajoči filter ki bi jih lahko pritrdili na obcestne nadzorne kamere, jih enkrat kalibrirali in nato omogočili jasen pogled v notranjost vozila.

Zgoraj nefiltriran pogled na vetrobransko steklo avtomobila. Spodaj enak pogled s fizičnim polarizacijskim filtrom, pritrjenim na kamero. Vir: https://arxiv.org/pdf/2109.02119.pdf
S priljubljenim prehodom z namenskih kamer na mobilne senzorje se je prisotnost polarizacijskega filtra v popularni kulturi v veliki meri zmanjšala na njegovo vključitev v sončna očala razumne kakovosti, kjer lahko uporabnik opazuje njegove lastnosti ubijanja odseva z nagibanjem svojega zornega kota ali spreminjanjem pogled na odsevni predmet.
Sončno svetlobo razpršijo molekule kisika in dušika, pri čemer je modra svetloba bolj razpršena kot druge valovne dolžine, zaradi česar je modra izvorna barva jasnega neba podnevi. Modra svetloba je polarizirana in a linearno ali krožno polarizirana leča lahko učinkovito odstrani to polarizirano svetlobo in pri tem odstrani odseve.
Časopis priznava, da bi lahko zadimljena vetrobranska stekla ovirala ali celo onemogočila to metodo vpogleda v avto. Vendar, saj je to omejeno z zakonodajo Združenega kraljestva, ker se predpisi v ZDA razlikujejo glede na državo, prispevek tega ne obravnava kot glavno oviro.
YOLO
Sistem, ki ga predlaga dokument, je namenjen integraciji v civilno infrastrukturo, kot so vladne nadzorne kamere ob cestah. Zavedajoč se možnih ovir zaradi stroškov, so raziskovalci preizkusili različne konfiguracije sistema za prepoznavanje objektov na različnih ravneh kakovosti opreme za zajem in ponudili scenarij z minimalnimi stroški, kjer bi lahko obstoječim kameram dodali poceni polarizacijske filtre, z vsemi drugimi vidiki sistemski daljinec.
Preizkušeni so bili štirje okviri za prepoznavanje predmetov: Samo enkrat pogledaš (YOLO) različici 3 in 4; SSD osnovno omrežje; Hitrejši R-CNNIn CenterNet. V testih so bili najbolj natančni rezultati pridobljeni z YOLO V3, z uporabo dvostopenjskega delovnega toka, ki najprej lokalizira območje vetrobranskega stekla in nato poišče mobilno napravo v tem prostoru.
Vendar pa potreba po predvajanju videoposnetka prek dveh omrežij povzroči manj kot optimalno hitrost sličic v sekundi 13.15 sličic na sekundo v primerjavi s skoraj 30 sličicami na sekundo pri enostavnejšem sistemu. Kakovost rezultatov je odvisna od vhodne opreme in raziskovalci so ugotovili, da je bila pri boljšem kompletu možna stopnja natančnosti skoraj 96 %, pri cenejšem pa 74.35 %, ko je bil vnos razdeljen med nizkocenovne kamere in kakovostnejšo opremo. kamere.
Omejitev priznanih kršitev
Poleg tega, da bi bil sistem ekonomsko uspešen, so raziskovalci zaskrbljeni za razvoj popolnoma avtomatiziranega sistema z minimalnim potrebnim človeškim nadzorom, sistem pa je bil zasnovan tako, da samodejno zagotavlja globe. Ker pa zakoni o uporabi mobilnega telefona med vožnjo po vsem svetu postajajo vse strožji, s kaznimi, ki lahko presegajo zgolj globe ali odbitke vozniških točk (tj. v Združenem kraljestvu), se zdi verjetno, da bo naključno človeško preverjanje ostalo dejavnik pri uvajanju tak sistem.

Kljub uporabi optičnega toka in drugih metod za upoštevanje celotne video vsebine algoritmi za prepoznavanje objektov, kot je YOLO, obravnavajo vsak okvir kot "popolno zgodbo", naslednji okvir pa za kasnejši projekt. Zato je treba preprečiti, da bi sistem te vrste izdal (na primer) 128 ločenih glob, ki zajemajo 128 sličic videoposnetka za zajemanje kršitev.
Da bi se temu izognili, sistem vključuje algoritem za sledenje objektom Globoko RAZVRŠČANJE, ki vsakemu prepoznavanju kršitve doda edinstven 'ID dogodka' in zagotovi, da se ID ne podvaja med okvirji znotraj enega zaporedja zajemanja.
Ravnanje z nočnim nadzorom
Za nočne razmere raziskovalci privzeto uporabljajo infrardeče zajemanje, kot je bilo uporabljeno v prejšnjih raziskovalnih projektih, ki so raziskovali isti izziv. Testirali so IR valovne dolžine 850 in 730 nanometrov in ugotovili, da so najboljše podrobnosti zajete s 730 nm.

Prispevek trdi, da je potrebna nadaljnja preiskava, da se ugotovi, v kolikšni meri bi lahko zajemanje infrardečih žarkov uporabili podnevi.
datum
Za bolj ekonomično enostopenjsko različico sistema so raziskovalci uporabili 2,235 slik registrskih tablic iz Nabor podatkov Google Open Images, ter 2150 zalog in po meri izdelanih slik mobilnih telefonov. Ker je bilo treba vključiti slike telefonov, ki jih držijo vozniki, je bilo 1,700 slik telefonov posnetih posebej za projekt.
Dvostopenjski sistem je poleg podatkov, uporabljenih v enostopenjskem procesu, zahteval opombo 487 vetrobranskih stekel, uporabljenih za usposabljanje prvega koraka postopka.
Ker ni bilo dostopa do uradne infrastrukture za nadzor cest, so vse slike posneli prostovoljci, da bi se približali podobnim razmeram.
Izključitve
Končni rezultati ponujajo vrsto standardov natančnosti, ki bi jih bilo treba zamenjati s stroški izvajanja, z vrhunsko opremo za zajemanje in rezultati obdelave, ki ponujajo največjo natančnost in nedvomno "sprejemljivo" natančnost, ki jo je mogoče doseči s poceni naknadnim opremljanjem obstoječe opreme za nadzor v mestih .

Cenejši "enostopenjski" cevovod doseže približno 75-odstotno natančnost z najnižjimi stroški izvedbe (tj. vgradnja poceni polarizacijskega filtra), medtem ko bolj zapleten dvostopenjski sistem (ki izolira območje vetrobranskega stekla, preden poišče mobilna naprava, ki jo drži voznik) dosega višje stopnje natančnosti, vendar je lahko primerna samo za novo infrastrukturo, odvisno od razpoložljivega proračuna. V obeh primerih je kakovost opreme za zajemanje dodatna spremenljivka.
Kot je navedeno zgoraj, se zdi, da raziskovalčevo dojemanje izvedljivosti projekta temelji na predpostavki, da mora sistem delovati popolnoma avtonomno – kar je vprašljiva zahteva.
Za več podrobnosti o izvedbi in uporabljenih pristopih si oglejte spodnji uradni videoposnetek projekta.
















