Робототехника
Гибкая роботизированная рука, управляемая очками дополненной реальности
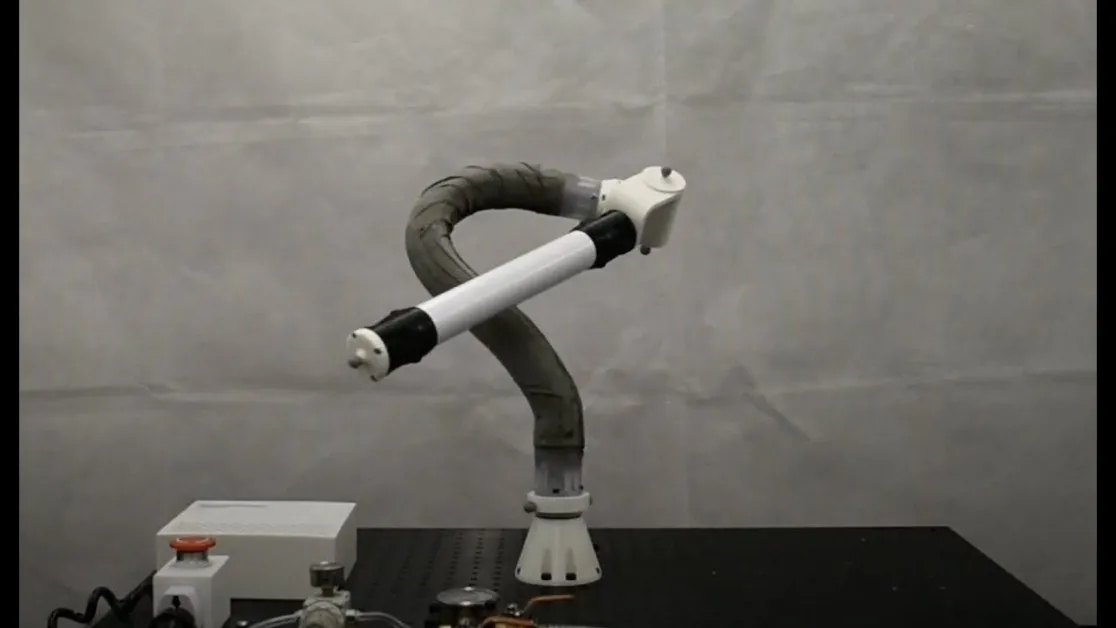
Исследователи из Имперского колледжа Лондона создали гибкую роботизированную руку, которой человек может управлять с помощью очков дополненной реальности (AR). Гибко настраиваемый роботизированный манипулятор можно крутить и поворачивать во всех направлениях и использовать в таких областях, как обслуживание космических кораблей, производство и реабилитация после травм.
Люди могли вручную сгибать руку робота в нужную форму для каждой задачи, и это возможно благодаря слоям майларовых листов, расположенных внутри. Каждый из этих майларовых листов скользит друг по другу и может зафиксироваться на месте. При этом у некоторых пользователей возникают проблемы с изгибом робота без руководства.
Внедрение технологии дополненной реальности
Чтобы преодолеть некоторые из этих проблем, команда исследователей из лаборатории Imperial REDS (манипулирование роботами: инженерия, дизайн и наука) разработала систему, чтобы пользователи могли полагаться на AR для настройки робота. Благодаря умным очкам смешанной реальности и камерам слежения за движением пользователям предоставляются шаблоны и дизайны, которые накладываются на реальную среду. Затем манипулятор робота можно настроить в соответствии с шаблоном. Чтобы упростить задачу, шаблон становится зеленым, когда конфигурация выполнена успешно, и робот фиксируется на месте.
Доктор Николас Рохас из Imperial’s Dyson School of Design Engineering является старшим автором статья про исследование .
«Одна из ключевых проблем при настройке этих роботов — точность их нового положения. Мы, люди, не очень хорошо умеем следить за тем, чтобы новое положение соответствовало шаблону, поэтому мы обратились за помощью к дополненной реальности», — сказал доктор Рохас.
«Мы показали, что дополненная реальность может упростить работу с нашим гибким роботом. Этот подход предоставляет пользователям ряд простых в создании поз робота для самых разных задач, не требуя при этом особых технических знаний».
Тестирование и применение системы
Система была протестирована на пяти мужчинах 20-26 лет, имеющих опыт работы в робототехнике. Однако у них не было опыта манипулирования податливыми роботами. Согласно опубликованной статье, им удалось успешно и точно настроить робота с помощью новой системы.
Подобная система может найти множество применений, например, производство и техническое обслуживание автомобилей. Небольшой вес манипулятора делает его особенно пригодным для обслуживания космических кораблей, а его мягкость позволяет использовать его для реабилитации после травм.
Исследователи с докторской степенью Алекс Рэнн и Ангус Кларк являются соавторами исследования.
«Во многих смыслах его можно рассматривать как отдельную, более гибкую третью руку. Это может помочь во многих ситуациях, когда может пригодиться дополнительная конечность и помочь распределить рабочую нагрузку», — сказали они.
Исследователи продолжат работу над улучшением робота и его дополненной реальности, а также попытаются внедрить сенсорные и звуковые элементы, чтобы повысить точность робота. Еще одна важная цель — укрепить роботов, поскольку они становятся менее жесткими, когда фиксируются на месте. Эти характеристики могут повлиять как на точность, так и на точность.
