
로보틱스
전력이 부족한 자율 로봇을 위한 모바일 충전 시스템
러시아 연구원들은 전원 콘센트 부족으로 자율성이 제한되는 농업 및 산업용 로봇을 위한 임시 충전 임무를 수행할 수 있는 프로토타입 로봇을 개발했으며 모바일 로봇 시스템에 적용할 수 있는 충전 플러그/소켓 구성에 대한 제안된 표준을 특징으로 합니다.
'모바일차저' 프로토타입, 공개 모스크바에 있는 Skolkovo Institute of Science and Technology의 최근 논문에서는 기내 급유를 위해 설계된 군용 항공 운송 시스템의 광범위한 연동 기능과 다르지 않은 결합 메커니즘을 갖추고 있습니다.
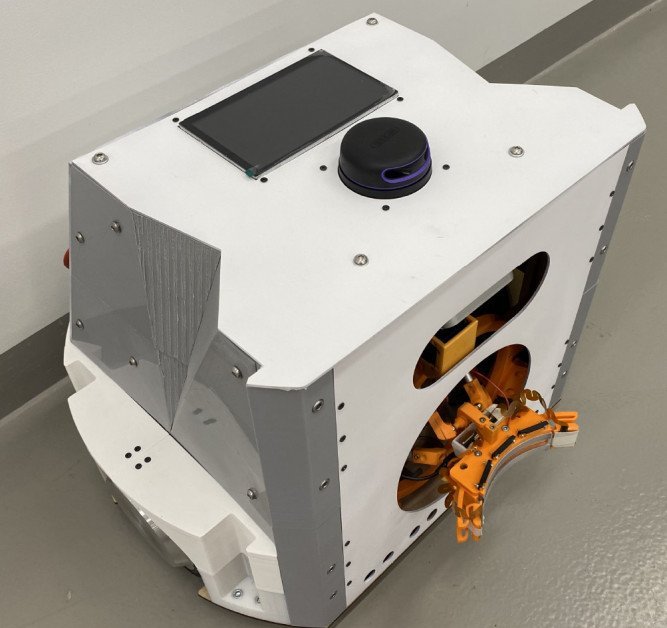
MobileCharger 프로토타입 로봇. 출처 : https://arxiv.org/pdf/2107.10585.pdf
MobileCharger는 Volkswagen의 'Laderoboter' 모바일 충전 로봇 및 삼성의 EVAR 충전 로봇과 같은 최근 몇 년간의 유사한 이니셔티브를 여러 가지 방법으로 개선하려고 시도합니다. 재충전 작업을 위한 공간 요구 사항을 줄임으로써(EVAR의 약점); 컨볼루션 신경망(CNN)을 사용하여 참여 작업을 최적화합니다. LiDAR 및 촉각 센서를 포함한 다양한 센서를 사용하여 충전할 로봇의 상대적 위치를 추정합니다.

커플링 시스템은 서로 다른 디자인의 필드 로봇을 수용하고 공장 바닥의 평평한 표면보다 더 고르지 않은 지형을 특징으로 할 수 있는 환경을 고려하기 위해 세 방향으로 상대적으로 자유로운 움직임을 특징으로 합니다.
충전 작업은 22볼트의 일관된 전송으로 약 XNUMX시간 동안 지속됩니다. 이 과정에서 수평 또는 수직 오정렬이 접지되지 않은 전기 방전의 가능성과 함께 로봇 중 하나 또는 둘 모두의 손상으로 이어질 가능성이 매우 높기 때문에 물리적 연결이 일관되게 유지되는 것이 중요합니다.
MobileCharger에 포함된 인버티드 델타 액추에이터는 현장 재충전 시나리오에 대한 최신 솔루션보다 더 나은 작동 속도를 제공하며 연구원들은 작고 독특한 디자인이 제조하기 더 쉬울 것이라고 주장합니다.

델타 액츄에이터는 또한 자석 기반 잠금 기능을 갖추고 있지만, 이것만으로는 재충전 작업 중에 안전한 접촉을 유지하기에 충분하지 않으며 설정 링과 전극 및 서보 모터가 있는 엔드 이펙터를 비롯한 몇 가지 보완적인 접근 방식으로 백업됩니다.
디자인에 구애받지 않는 충전
MobileCharger는 재충전이 필요할 수 있는 모든 로봇에 대한 완전한 도메인 지식을 갖도록 설계되지 않았지만 대신 다양한 방법을 사용하여 로봇 섀시 어딘가에서 호환 가능한 충전 소켓을 식별하고 가능한 근접한 위치로 이동합니다. 대상 로봇에 연결합니다.
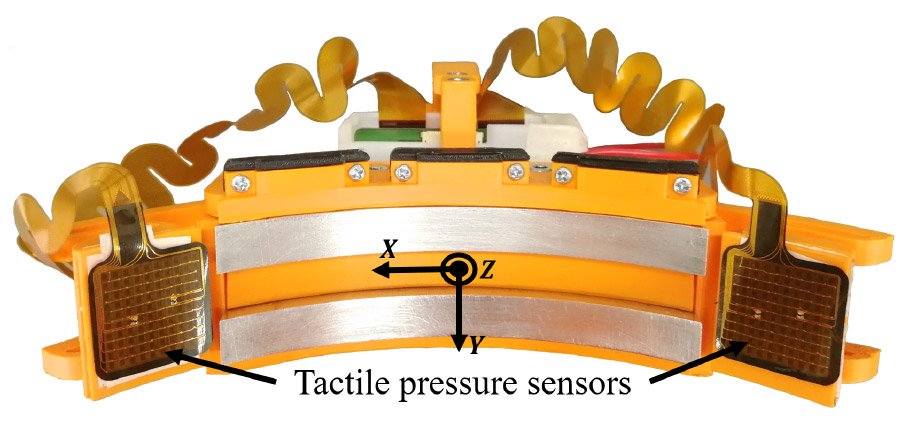
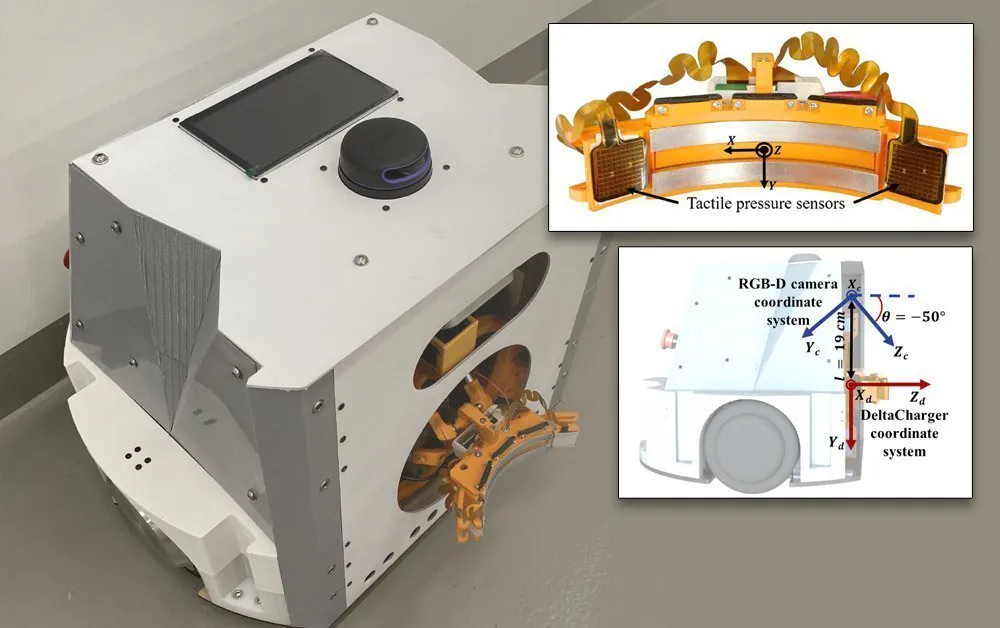
MobileCharger의 도킹 메커니즘에 있는 촉각 압력 센서 어레이.
효과적으로 MobileCharger는 과일 따기 로봇의 RGB-D(깊이 지원) 컴퓨터 비전 시스템과 밀폐형 산업용 로봇의 압력 감지 촉각 및 촉각 피드백 시스템을 포함하여 정렬 평가 및 일관된 참여 문제에 다양한 솔루션을 제공합니다.
이미지 인식
MobileCharger의 LiDAR 스캐너는 Intel RealSense D435 RGB로 백업됩니다. 깊이 카메라 근접 추정을 위해 로봇의 CNN 기반 접촉 추정 기능을 위한 피드 메커니즘 역할도 합니다.
MobileCharger에서 사용하는 물체 감지 시스템은 제안된 충전 도크 설계를 중심으로 하는 맞춤형 학습 데이터 세트로 구동되는 3개의 레이어가 있는 효과적인 실시간 이미지 인식 시스템인 YOLOv106를 기반으로 합니다.
이 데이터 세트에는 다양한 조명 조건과 170도에서 120도까지의 요(yaw) 변화 범위에서 만들어진 50개의 샘플이 포함되어 있으며 훈련용 75개와 테스트용 105개로 나뉩니다. 교육 데이터 세트의 이미지는 840×480 해상도이며 RGB 및 깊이 데이터가 특징입니다.
컨볼 루션 신경망
MobileCharger에 사용되는 CNN은 충전 작업 중 일관된 접촉 문제를 해결하고 두 개의 맞춤형 데이터 세트로 구동됩니다. 두 번째 데이터 세트는 엔드 이펙터(충전 어셈블리)의 수평 및 수직 오정렬을 처리하고 600개의 데이터 쌍을 포함합니다.
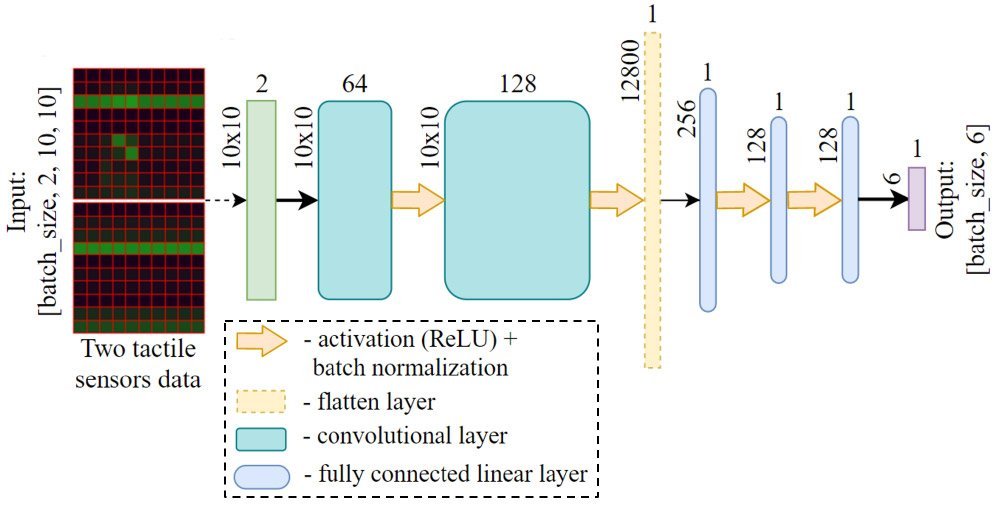
일관성 파악을 위한 CNN 아키텍처.
데이터는 67%의 교육 세트와 33%의 평가 세트로 분할되었으며 정확도는 목표 메트릭으로 사용되었습니다.
CNN/YOLO 방법에 정착하기 전에 연구자들은 SVM(Support Vector Machine)과 함께 HoG(Histogram of Oriented Gradients)를 사용하는 것과 Canny 에지 검출기로 윤곽 감지를 사용하는 것을 고려했습니다. 어느 방법도 현장 충전 작업의 문제에 대해 적절하게 탄력적인 것으로 간주되지 않았습니다.
스웜차지
MobileCharger 시스템은 실내 및 실외 환경용으로 설계되었으며 연구원의 향후 작업은 현지화 및 매핑 알고리즘의 개발을 다룰 것입니다. 1자유도 또한 연결 메커니즘의 롤 축에서 전극 회전을 위한 추가 시설로 탐색됩니다.
예상할 수 있듯이 독점 결합 시스템은 궁극적으로 로봇 및 자율 장치의 더 넓은 에코 구조를 위한 것이며 SwarmCharge라고 합니다. MobileCharger는 휴머노이드, 네 발 달린 동물 및 UAV 메커니즘을 포함하여 다양한 유형의 로봇을 지원하는 시스템입니다.















