Robotika
Robot Berjalan Lebih Cepat Dengan Kaki Fleksibel Baru
Roboticists di University of California San Diego telah mengembangkan kaki fleksibel untuk robot. Teknologi baru ini dapat membuat robot berjalan 40 persen lebih cepat di permukaan yang tidak rata seperti kerikil dan serpihan kayu.
Pengembangan baru ini penting untuk berbagai aplikasi yang berbeda, terutama misi pencarian dan penyelamatan.
Penelitian ini akan dipresentasikan di konferensi RoboSoft, yang akan diadakan secara virtual dan berlangsung antara 15 Mei dan 15 Juli 2020.
Emily Lathrop adalah mahasiswa Ph.D. di Jacobs School of Engineering di UC San Diego dan penulis utama makalah ini.
“Robot perlu dapat berjalan cepat dan efisien di permukaan alami yang tidak rata sehingga mereka dapat pergi ke mana saja manusia dapat pergi, tetapi mungkin tidak seharusnya,” kata Lathrop.
Michael T. Tolley adalah profesor di Departemen Teknik Mesin dan Aeroangkasa di UC San Diego. Ia adalah penulis senior makalah ini.
“Biasanya, robot hanya dapat mengontrol gerakan pada sendi tertentu,” kata Tolley. “Dalam penelitian ini, kami menunjukkan bahwa robot yang dapat mengontrol kekakuan, dan dengan demikian bentuk, kaki mereka outperforms desain tradisional dan dapat beradaptasi dengan berbagai jenis permukaan.”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Kaki Robot Fleksibel
Kaki robot fleksibel terdiri dari membran latex yang diisi dengan ampas kopi. Ampas kopi dapat berubah antara padat dan cair. Mekanisme yang memungkinkan media granular, seperti ampas kopi, untuk berperilaku seperti ini disebut granular jamming. Sebagai hasilnya, robot dapat berjalan lebih cepat dan memiliki cengkeraman yang lebih baik.
Ketika kaki robot menyentuh tanah, mereka menjadi keras dan menyesuaikan diri dengan permukaan untuk mendapatkan pijakan yang solid. Ketika mereka bergerak, kaki mereka menjadi longgar dan mengendur antara langkah, dan struktur pendukung digunakan untuk membantu mereka tetap fleksibel saat terjepit.
Kaki fleksibel ini adalah yang pertama dari jenisnya yang diuji di permukaan yang tidak rata.

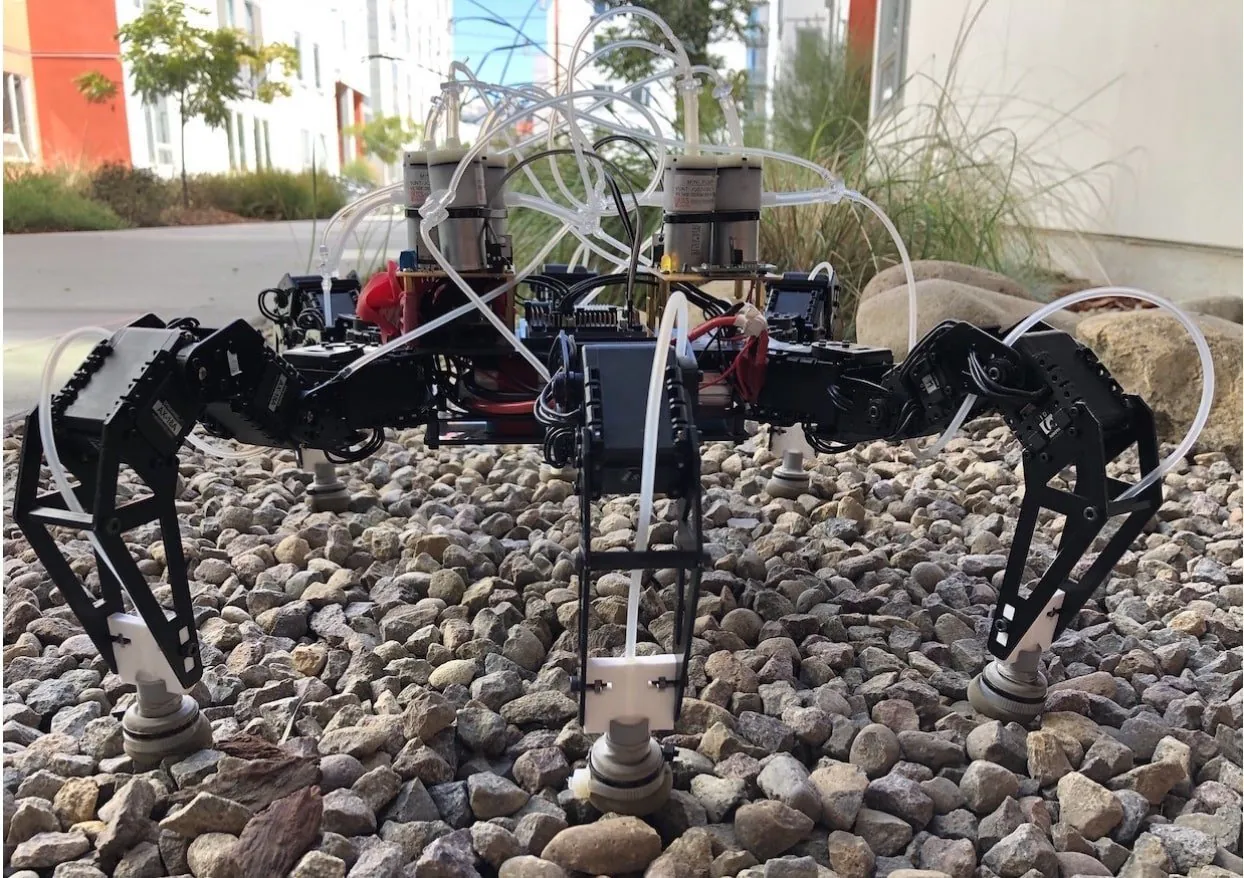
Peneliti memasang kaki pada robot hexapod dan merancang serta membangun sistem on-board. Sistem on-board ini dapat menghasilkan tekanan negatif dan positif untuk mengendurkan dan mengencangkan kaki antara setiap langkah. Untuk mengencangkan kaki, pompa vakum menghilangkan udara antara ampas kopi. Mereka juga dapat dipasifkan jika berat robot memaksa udara keluar dari antara ampas kopi.
Permukaan Tidak Rata
Robot diuji berjalan di berbagai permukaan, termasuk tanah datar, serpihan kayu, dan kerikil, dengan dan tanpa kaki fleksibel. Temuan tersebut adalah bahwa penjepitan pasif paling efektif di tanah datar dan penjepitan aktif paling baik di batu longgar.
Dengan kaki fleksibel, kaki robot dapat mencengkeram tanah lebih baik, yang pada gilirannya meningkatkan kecepatannya. Ini terutama benar ketika robot berjalan di tanjakan dan permukaan yang tidak rata.
Nick Gravish adalah profesor di Departemen Teknik Mesin dan Aeroangkasa UC San Diego dan co-penulis studi ini.
“Dunia alami dipenuhi dengan permukaan yang sulit untuk robot berjalan — licin, berbatu, dan lunak semua membuat berjalan menjadi rumit,” kata Gravish. “Kaki yang dapat beradaptasi dengan berbagai jenis tanah dapat membantu robot meningkatkan mobilitas.”
Peneliti sekarang akan mencoba mengintegrasikan sensor lunak di bagian bawah kaki, yang akan memungkinkan papan kontrol elektronik untuk digunakan. Papan kontrol elektronik akan mengidentifikasi jenis tanah yang akan dilalui robot dan apakah kaki perlu diaktifkan atau dipasifkan. Peneliti juga akan terus meningkatkan desain dan algoritma kontrol untuk efisiensi yang lebih baik.












