रोबोटिक्स
रोबोट नए विकसित लचीले पैर के साथ तेजी से चलते हैं
कैलिफोर्निया विश्वविद्यालय सैन डिएगो के रोबोटिक्स विशेषज्ञों ने रोबोट के लिए लचीले पैर विकसित किए हैं। नई तकनीक के परिणामस्वरूप रोबोट असमान इलाकों जैसे कंकड़ और लकड़ी के चिप्स पर 40 प्रतिशत तेजी से चल सकते हैं।
यह नया विकास विभिन्न अनुप्रयोगों के लिए महत्वपूर्ण है, विशेष रूप से खोज और बचाव मिशनों के लिए।
इस शोध को RoboSoft सम्मेलन में प्रस्तुत किया जाएगा, जो आभासी होगा और 15 मई से 15 जुलाई, 2020 के बीच होगा।
इमिली लाथ्रोप यूसी सैन डिएगो के जैकब्स स्कूल ऑफ इंजीनियरिंग में पीएचडी छात्र हैं और इस पत्र के पहले लेखक हैं।
“रोबोटों को तेजी से और कुशलता से प्राकृतिक, असमान इलाकों पर चलने में सक्षम होना चाहिए ताकि वे हर जगह जा सकें जहां मनुष्य जा सकते हैं, लेकिन शायद नहीं जाना चाहिए,” लाथ्रोप ने कहा।
माइकल टी टॉली यूसी सैन डिएगो में यांत्रिक और एयरोस्पेस इंजीनियरिंग विभाग में प्रोफेसर हैं। वह इस पत्र के वरिष्ठ लेखक हैं।
“आम तौर पर, रोबोट केवल विशिष्ट जोड़ों पर गति को नियंत्रित करने में सक्षम होते हैं,” टॉली ने कहा। “इस काम में, हमने दिखाया कि एक रोबोट जो अपने पैरों की कठोरता और इसलिए आकार को नियंत्रित कर सकता है, पारंपरिक डिजाइनों से बेहतर प्रदर्शन करता है और विभिन्न प्रकार के इलाकों के अनुकूल हो सकता है।”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
लचीले रोबोटिक पैर
लचीले रोबोटिक पैर एक लेटेक्स झिल्ली से बने होते हैं जो कॉफी के मैदान से भरे होते हैं। कॉफी के मैदान एक ठोस और तरल के बीच आगे और पीछे जाने में सक्षम होते हैं। जो तंत्र ग्रैन्युलर मीडिया, जैसे कॉफी के मैदान, को इस तरह से कार्य करने की अनुमति देता है, उसे ग्रैन्युलर जैमिंग कहा जाता है। परिणामस्वरूप, रोबोट तेजी से चल सकते हैं और बेहतर पकड़ रख सकते हैं।
जब रोबोट पैर जमीन पर पड़ते हैं, तो वे सख्त हो जाते हैं और सतह के अनुरूप हो जाते हैं ताकि ठोस आधार स्थापित किया जा सके। जब वे चलते हैं, तो पैर अनजाम हो जाते हैं और कदमों के बीच ढीले हो जाते हैं, और समर्थन संरचनाओं पर निर्भर करते हैं ताकि वे जाम होने पर लचीले रहें।
इन लचीले पैरों का पहली बार असमान सतहों पर परीक्षण किया गया था।

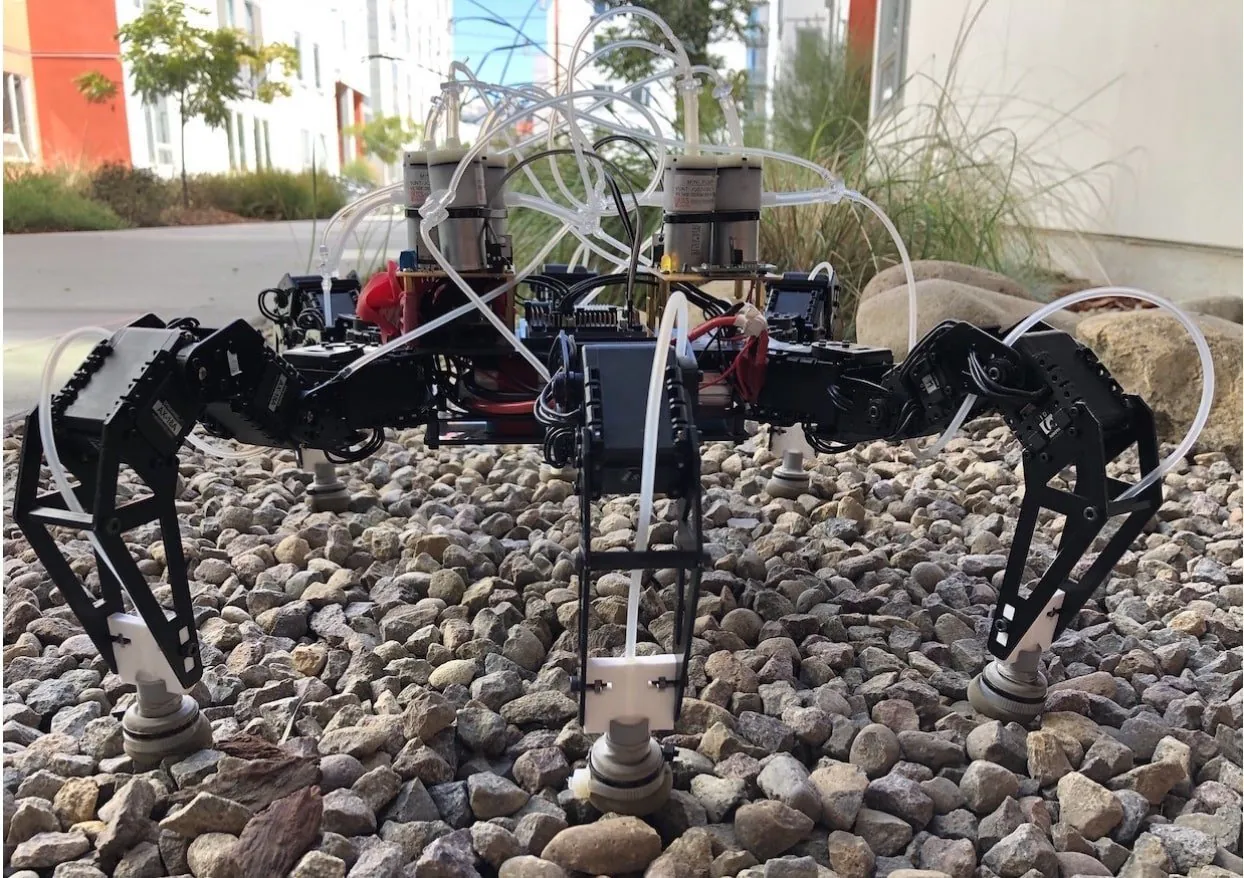
शोधकर्ताओं ने पैरों को एक हेक्सापोड रोबोट पर स्थापित किया, और उन्होंने एक ऑन-बोर्ड सिस्टम डिजाइन और निर्मित किया। ऑन-बोर्ड सिस्टम प्रत्येक चरण के बीच पैरों को अनजाम और जाम करने के लिए नकारात्मक दबाव और सकारात्मक दबाव उत्पन्न करने में सक्षम है। पैरों को जाम करने के लिए, एक वैक्यूम पंप कॉफी के मैदान के बीच हवा को हटा देता है। वे पैरों के वजन से हवा को बाहर निकालकर पассив रूप से जाम हो सकते हैं।
असमान सतह
रोबोट का परीक्षण विभिन्न सतहों पर चलने के लिए किया गया था, जिनमें समतल जमीन, लकड़ी के चिप्स और कंकड़ शामिल थे, जिनमें लचीले पैर थे और जिनमें नहीं थे। परिणाम यह था कि पассив जैमिंग समतल जमीन पर सबसे प्रभावी है और सक्रिय जैमिंग ढीले पत्थरों पर सबसे अच्छी है।
लचीले पैरों के साथ, रोबोट के पैर जमीन पर बेहतर पकड़ बना सकते थे, जिससे इसकी गति बढ़ जाती थी। यह विशेष रूप से तब सच था जब रोबोट तिरछे और असमान इलाकों पर चलता था।
निक ग्रेविश यूसी सैन डिएगो में यांत्रिक और एयरोस्पेस इंजीनियरिंग विभाग में प्रोफेसर हैं और अध्ययन के सह-लेखक हैं।
“प्राकृतिक दुनिया में रोबोटों के लिए चलने के लिए चुनौतीपूर्ण जमीन भरी हुई है – फिसलन, चट्टानी और गीली सतहें सभी चलने को जटिल बनाती हैं,” ग्रेविश ने कहा। “जो पैर विभिन्न प्रकार की जमीन के अनुकूल हो सकते हैं, वे रोबोटों को गतिशीलता में सुधार करने में मदद कर सकते हैं।”
शोधकर्ता अब पैरों के नीचे नरम सेंसर शामिल करने का प्रयास करेंगे, जो एक इलेक्ट्रॉनिक नियंत्रण बोर्ड का उपयोग करने की अनुमति देगा। इलेक्ट्रॉनिक नियंत्रण बोर्ड यह पहचानेगा कि रोबोट किस प्रकार की जमीन पर चलने जा रहा है और क्या पैरों को सक्रिय या निष्क्रिय रूप से जाम करने की आवश्यकता है। शोधकर्ता बेहतर दक्षता के लिए डिजाइन और नियंत्रण एल्गोरिदम में सुधार करना जारी रखेंगे।












