Robotika
Metoda učení umožňuje robotům učit se pozorováním lidí
Nová metoda učení vyvinutá výzkumníky na Carnegie Mellon University (CMU) umožňuje robotům přímo učit se z videí interakce lidí a zobecnit informace na nové úkoly, což jim pomáhá naučit se, jak vykonávat domácí práce. Metoda učení se nazývá WHIRL, což znamená Učení robotů napodobováním lidí v divočině, a pomáhá robotovi pozorovat úkoly a shromažďovat video data, aby nakonec naučil, jak dokončit práci sám.
Výzkum byl prezentován na konferenci Robotics: Science and Systems v New Yorku.
Napodobování jako způsob učení
Shikhar Bahl je doktorand na Robotics Institute (RI) na School of Computer Science Carnegie Mellon University.
„Napodobování je skvělý způsob, jak se učit,“ řekl Bahl. „Mít roboty, které se skutečně učí přímo pozorováním lidí, zůstává nevyřešeným problémem v oboru, ale tato práce činí významný krok k umožnění této schopnosti.“
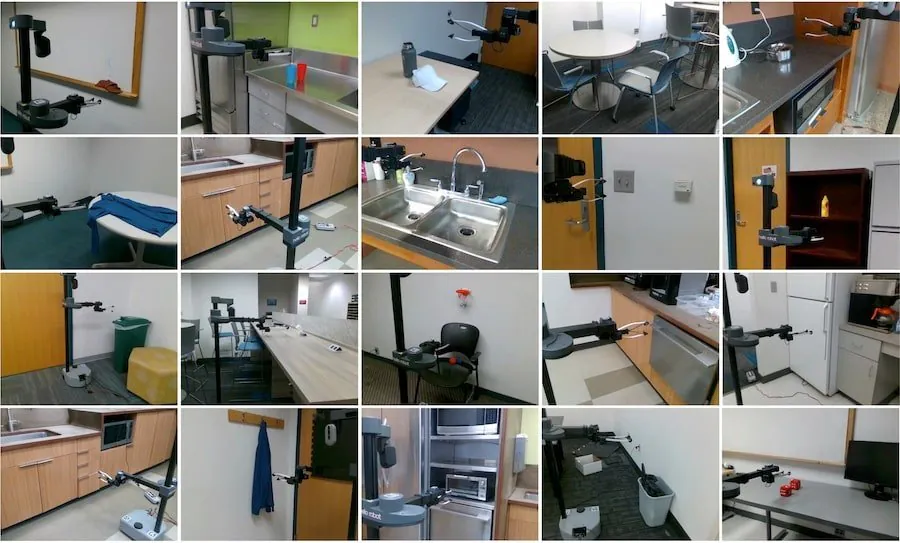
Bahl pracoval spolu s Deepakem Pathakem a Abhinavem Guptou, kteří jsou také členy fakulty RI. Tým přidal kamera a software do robotu, který se naučil dokončit více než 20 úkolů. Tyto úkoly zahrnovaly vše od otevírání a zavírání spotřebičů až po vyndání odpadkového pytle z koše. Každýkrát, když robot pozoroval člověka, který dokončoval úkoly, než se pokusil sám.
Pathak je asistent profesora na RI.
„Tato práce představuje způsob, jak přinést roboty do domácností,“ řekl Pathak. „Místo čekání, až budou roboti naprogramováni nebo školeni, aby úspěšně dokončili různé úkoly, než je nasadí do lidí domů, tato technologie umožňuje nasadit roboty a nechat je učit se, jak dokončit úkoly, a to vše, zatímco se přizpůsobují svým prostředí a zlepšují pouze pozorováním.“
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL vs. současné metody
Většina současných metod pro učení robota úkolům se spoléhá na napodobování nebo učení posilováním. U napodobovacího učení lidé ručně ovládají robota a učí ho, jak dokončit úkol, což vyžaduje opakování několikrát, než robot úkol zvládne. U učení posilováním je robot obvykle trénován na milionech příkladů v simulaci, než se přizpůsobí tréninku ve skutečném světě.
Zatímco obě tyto modely jsou efektivní pro učení robota jednomu úkolu ve strukturovaném prostředí, obtížně se škálovat a nasazují. Ale s WHIRL může robot učit z jakéhokoli videa člověka, který dokončuje úkol. Je také snadno škálovatelný, není omezený na jeden konkrétní úkol a může fungovat v domácích prostředích.
WHIRL umožňuje robotům dokončovat úkoly ve svých přirozených prostředích. A zatímco první几 pokusy obvykle skončily neúspěchem, mohl se naučit velmi rychle po několika úspěších. Robot nemusí vždy dokončovat úkol stejnými pohyby jako člověk, ale to je proto, že má jiné části, které se pohybují jinak. S tím said, výsledek dokončení úkolů je vždy stejný.
„Abychom mohli škálovat robotiku v divočině, musí být data spolehlivá a stabilní, a roboti by se měli stát lepšími ve svém prostředí tím, že cvičí sami,“ řekl Pathak.
