الروبوتات
حشرة الخنفساء مع معدات البحث والإنقاذ التي تعمل بالذكاء الاصطناعي
قام باحثون دوليون في مجال الروبوتات بتطوير نظام بحث وإنقاذ حضري (USAR) يستخدم خنفساء قابلة للتوجيه حية لنقل نظام كشف الناجين بالاشعة تحت الحمراء الذي تمت تمكينه بالتعلم الآلي من خلال سيناريوهات الكوارث التي لا يمكن التنقل فيها.
النظام هو تعاون بين أقسام البحث في سنغافورة والصين وألمانيا والمملكة المتحدة. يستخدم خنفساء مدغشقر كمركبة، ويتوفر لديه طاقة كافية لتشغيله لعدة ساعات.

Source: https://arxiv.org/abs/2105.10869
يتميز نظام الإنقاذ الهجين بنموذج تعلم آلي للكشف عن البشر تم تدريبه على صور الأشعة تحت الحمراء، ويعمل نظام الكشف عن الأشعة تحت الحمراء المتنقل بشكل مستقل عند الضرورة، ويرسل الناجين الذين تم العثور عليهم إلى محطة تشغيل قاعدة.
موارد محلية محدودة
يتطلب إطار العمل للتعلم الآلي تشغيله على موارد راماتيك جداً: فقط 191.8 كيلو بايت من راماتيك الثابتة و 1988 كيلو بايت من ذاكرة الفلاش متاحة للنظام من المتطلبات العامة للجهاز، الذي يجب أن يوفر أيضاً التحفيز الكهربائي للحشرة.

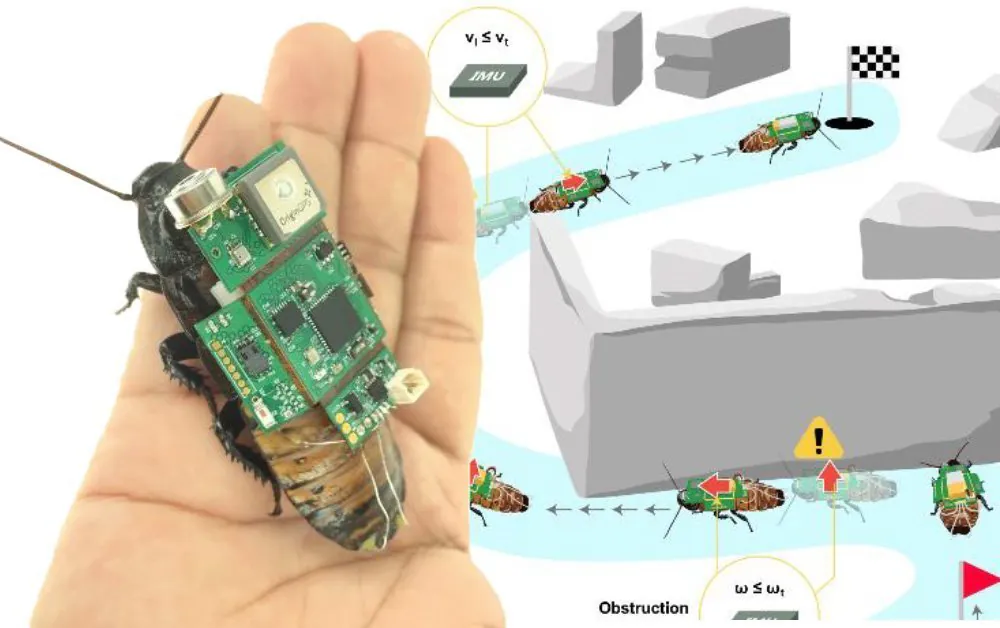
تتكون الكتلة الوظيفية الثلاثة ل背pack الخنفساء، الموضحة أعلاه، من تحفيز لاسلكي، وحدة تحكم رئيسية ومكونات محيطية، مع نظام التعلم الآلي المشتق من الأشعة تحت الحمراء ووظيفة الملاحة المضمنة في وحدة التحكم الرئيسية. تم تقسيم دائرة الهيكل إلى عدة مكونات من أجل ملاءمة هندسة الخنفساء بشكل أفضل.
تتم التحكم في خنفساء مدغشقر (من بين أكبر الأنواع في العالم، مع سعة حمل قصوى تبلغ 15 جرامًا) بواسطة صدمات كهربائية صغيرة توجيهها في اتجاه أو آخر، يتم تنفيذها بواسطة أقطاب متصلة بأنتين الخنفساء (cerci) وبجوفها، وتم تثبيت الأقطاب باستخدام شمع النحل.
إضافة الذكاء الاصطناعي إلى البحث والإنقاذ الحشرات
يطور المبادرة الجديدة عملًا سابقًا من جامعة كاليفورنيا بيركلي وجامعة نانيانغ التكنولوجية في سنغافورة، والتي تصورت لأول مرة استخدام خنافس قابلة للتوجيه في سيناريوهات البحث والإنقاذ الحضرية.

2016 بحث في التحكم في مسار طيران الخنفساء. Source: https://www.youtube.com/watch?v=iljHXpE4LG8
على الرغم من أن الخنافس لها القدرة الإضافية على الطيران، فإن سعتها الحمولة تقل تبعاً لذلك، مما يقلل من القدرات المحتملة للتكنولوجيا على متنها، ويجعل استهلاك الطاقة يصل إلى مستوى حرج، خاصة في حالة الحاجة إلى تشغيل خوارزمية التعلم الآلي.
يستخدم نظام التعرف الآلي على البشر على متن الطائرة نموذج تصنيف الصور باستخدام آلة الدعم المتجه (SVM) و مخطط التدرج الموجه.
توجيه حركة الخنفساء بواسطة نظام الملاحة المتكامل، ويوجه “البيوبوت” إلى وجهة محددة مسبقاً دون أي معرفة بالحواجز المتداخلة. في معظم الأحيان، تحل مهارات الملاحة القوية للخنفساء معظم المشاكل في الوصول إلى موقع غير قابل للوصول.

Source: https://arxiv.org/abs/2105.10869
يتم التقاط الصور بواسطة نظام الأشعة تحت الحمراء على متن الطائرة بسرعة 1 هرتز، ويعمل بنجاح في المناطق المظلمة، ويرسل أي ناجين تم العثور عليهم إلى مركز قيادة في الوقت الفعلي. لتوفير الطاقة، يبدأ نظام تحليل الصور في العمل فقط إذا تم تشغيله بواسطة قراءة الأشعة تحت الحمراء الإيجابية.
يحتل النموذج مجرد 18.3 كيلو بايت من ذاكرة الفلاش و 52.2 كيلو بايت من راماتيك الثابتة، ويحقق وقت حساب يبلغ 95 مللي ثانية. الوقت الحاسوبي المعقول ضروري في سيناريو البحث والإنقاذ الحضري، لأن العلامات الأشعة تحت الحمراء البعيدة قد تُفوت في فترة المعالجة إذا غيّر الخنفساء اتجاهه وعبور التضاريس.
يتميز النظام أيضاً بمستشعرات لمراقبة درجة الحرارة والرطوبة وثاني أكسيد الكربون، من أجل تقديم تقارير عن الظروف المحلية لمحاولة إنقاذ محتملة، وتمكين مركز القيادة من توجيه الخنفساء بعيداً عن أي وضع قد يضعها في خطر.
اختبار في التضاريس المحاكاة
تم اختبار النظام في سيناريو كوارث محاكى (الصورة أعلاه)، مع التفاوض الفعال على الحواجز، باستثناء بعض التكوينات الصعبة جداً التي تتضمن صعوداً شديداً، لأن الخنفساء تتمتع بميزة وزن بسبب المعدات المرفقة.

كانت هندسة الملاحة في البداية تميل إلى الانخلاع عند مواجهة حواجز هائلة، مثل الحالات التي لا يمكن للخنفساء أن تتقدم فيها، وقام الباحثون بعد ذلك بتطوير نظام ملاحة ذكاء متوقع لتحسين الأداء في مواجهة الحواجز العالية.
في الحالات التي فشل فيها النظام، يخلص الباحثون إلى أن هذا يمكن أن يُعالج بزيادة مدة التجربة، على الرغم من أن هذا له آثار في سيناريو البحث والإنقاذ الحرج.
منظور الأشعة تحت الحمراء
يتمتع الكاميرا الأشعة تحت الحمراء على متن الطائرة بمواصفات متواضعة، تعمل عند 32×32 بكسل مع مجال رؤية 90 درجة. يتم تمرير الصور، عند تشغيلها، عبر مرشح تقليل الضوضاء المتوسطة.
يحقق النظام نسبة نجاح تبلغ 87% في التمييز بين الأشخاص والانطباعات الحرارية الأخرى، وترتفع إلى 90% عند وجود نطاق قرب يبلغ 0.5 متر و 1.5 متر.
نظراً لقيود الطاقة وحجم الشريحة، لا يتضمن الدراسة الأولية نظام تحديد الموقع على متن الطائرة، وبالتالي لا يمكن تتبع موقع الخنفساء في الوقت الفعلي. يقترح الباحثون أن يمكن تنفيذ حساب الموت كحل لتوفير الطاقة، مع إشارات موقع منخفضة الطاقة تُرسل إلى مركز القيادة، في التطبيقات المستقبلية.
الحشرات كمنقذين في البحث والإنقاذ
جلبت السنوات العشر الماضية سلسلة من مشاريع البحث التي تسعى إلى استخدام متانة الحشرات وقوة الملاحة لإنشاء أنظمة هجينة أو روبوتية نقية للبحث والإنقاذ. بالإضافة إلى العمل المتعلق بالخنافس في عام 2016 الذي يسبق هذه المبادرة، كان هناك العديد من المحاولات لاستنساخ القدرات الحشرية في شكل روبوتي خالص.
تشمل هذه مشروع بحثي في عام 2019 من جامعة كاليفورنيا، الذي قدم روبوتاً بسيطاً من الناحية الهندسية مستنداً إلى مبادئ الخنفساء، وهو أحد أولى المشاريع من نوعها التي تناولت الهشاشة القصوى للروبوتات الحشرية.












