
机器人
配备人工智能搜索和救援设备的蟑螂
国际机器人研究人员开发了一种城市搜索和救援(USAR)系统,该系统使用“可操纵”活蟑螂来运输小型机器学习红外幸存者检测系统,穿过其他无法航行的灾难场景。
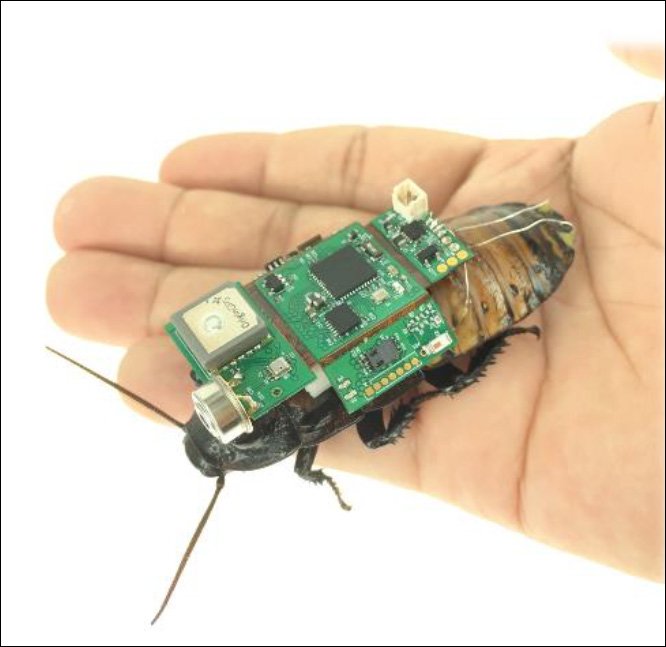
系统 是新加坡、中国、德国和英国研究部门之间的合作。 它使用 马达加斯加蟑螂 作为车辆,有足够的动力运行几个小时。
资料来源:https://arxiv.org/abs/2105.10869
该混合救援系统具有用于人体检测的机器学习模型,该模型经过红外(IR)图像训练,并为移动红外检测系统提供动力,该系统可以根据需要自主运行,将发现的幸存者报告回基地操作站。
当地资源有限
机器学习框架需要在极其有限的资源上运行:根据设备的一般电源要求,系统仅剩下 191.8kB 的静态 RAM 和 1988kB 的闪存,该设备还必须为昆虫提供电刺激。

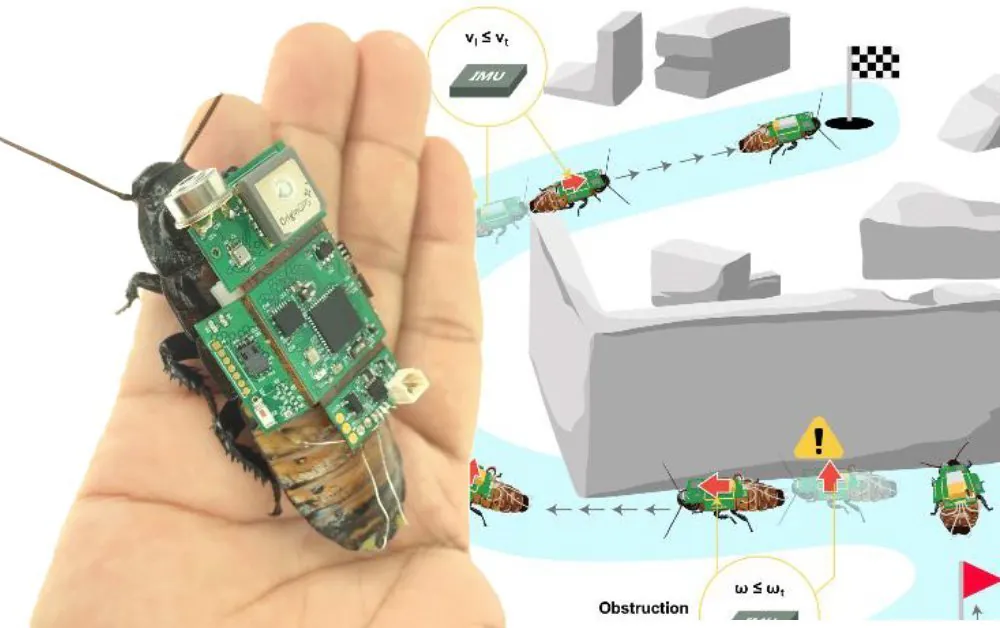
蟑螂背包的三个功能块(如上图所示)包括无线刺激、主控制器单元和外围组件,以及嵌入到主控制器单元中的红外机器学习系统和导航功能。 为了更好地适应蟑螂的几何形状,该装置的电路被分成几个组件。
马达加斯加蟑螂(其中 最大的物种 在世界上,最大负载能力为 15 克)是通过小的电击来控制的,这些电击将其引导到一个方向或另一个方向,这是通过植入到生物触角中的四个电极来实现的(切尔奇),并进入其腹部。 电极用蜂蜡固定。
将人工智能添加到昆虫搜索和救援中
这项新举措发展了加州大学伯克利分校和新加坡南洋理工大学的先前工作,该大学首先设想了 使用可操纵的甲虫 在 USAR 场景中。

2016 年控制甲虫飞行路径的研究。 来源:https://www.youtube.com/watch?v=iljHXpE4LG8
尽管甲虫具有额外的飞行能力,但它们的负载能力随后会降低,从而降低了机载技术的潜在能力,并使功耗需求达到临界水平,特别是在需要运行机器学习算法的情况下。
新举措中的机载自主人类识别系统使用图像分类模型,利用 支持向量机 (支持向量机)和 定向梯度直方图.
蟑螂的运动由集成导航系统引导,并引导“生物机器人”到达预定目的地,而无需了解中间的障碍物。 在大多数情况下,蟑螂自身强大的导航技能可以解决到达其他无法到达的位置的大部分问题。

资料来源:https://arxiv.org/abs/2105.10869
机载红外系统以 1 赫兹的频率捕获图像,在黑暗区域中成功运行,并通过无线方式向指挥中心实时报告任何发现的幸存者。 为了节省能源,图像分析系统只有在被正红外读数触发时才开始运行。
该模型仅占用 18.3kB 闪存和 52.2kB 静态 RAM,计算时间为 95 毫秒。 在 USAR 场景中,合理的处理时间至关重要,因为当蟑螂改变方向并穿越地形时,在处理间隔中可能会错过远距离的红外特征。
该系统还配备了传感器来监测温度、湿度和二氧化碳,以便报告当地情况以进行可能的救援尝试,并允许控制中心引导该生物远离任何可能危及它的情况。
在模拟地形中进行测试
该系统在模拟灾难场景(上图)中进行了测试,具有有效的障碍物谈判能力,除了某些特别具有挑战性的涉及眩晕攀爬的配置,因为蟑螂由于附加设备而处于重量劣势。

导航架构最初很容易陷入压倒性的障碍物中,例如即使是蟑螂也无法继续前进的情况,研究人员随后开发了一种预测反馈导航系统,以提高面对高障碍物时的性能。 该系统在没有或低障碍物的环境中能够实现100%的成功率,而在高障碍物的情况下成功率更高。
如果确实发生了故障,研究人员得出的结论是,可以通过增加实验持续时间来补救,尽管这在逻辑上对时间紧迫的 USAR 场景有影响。
红外视图
机载红外摄像头规格适中,分辨率为 32×32 像素,视角为 90 度。 图像在触发时会通过中值去噪滤波器。
该系统在区分人类受试者和其他类型的热特征方面的成功率达到 87%,当接近半径为 90m 和 0.5m 时,成功率上升到 1.5%。
由于能量和芯片尺寸的限制,最初的研究没有机载定位系统,因此不可能实时跟踪蟑螂的位置。 研究人员建议,在未来的实施中,航位推算可以作为一种节能解决方案来实施,将低能量定位信号转发回控制中心。
昆虫作为搜救人员
过去十年出现了大量研究项目,寻求利用昆虫的弹性和导航能力来创建用于搜索和救援场景的混合或纯机器人系统。 除了在这一最新举措之前进行的 2016 年甲虫相关工作之外,还进行了许多尝试以纯机器人形式重建类昆虫的能力。
这些包括a 2019年UoC研究项目 该公司提供了一种基于蟑螂原理、符合人体工程学的简单机器人,这是解决机器人昆虫极端脆弱性的首批项目之一。















