
机器人
新型 3D 打印材料可感知自身运动
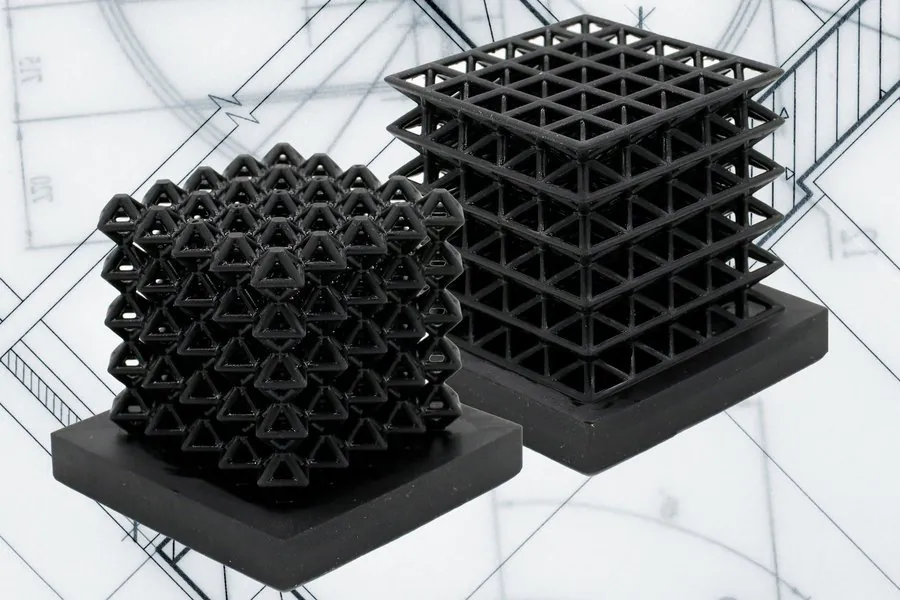
麻省理工学院的一组研究人员开发了一种新方法,用于 3D 打印材料,该材料具有可调节的机械性能,使它们能够感知自己的运动以及与环境的相互作用。 该团队使用一种材料并在 3D 打印机上进行了一次尝试,创建了传感结构。
他们首先采用 3D 打印的晶格材料,并在打印过程中将充气通道网络合并到结构中。 然后,他们可以通过测量结构被挤压、弯曲或拉伸时这些通道内的压力变化来了解材料如何移动。
晶格材料由重复图案的单个单元组成,通过改变单元的尺寸或形状,可以改变材料的机械性能。
这项新技术最终可以帮助创建带有嵌入式传感器的灵活软机器人,使机器人能够理解它们的姿势和运动。 它还可能导致可定制的可穿戴智能设备的开发。
Lillian Chin 是麻省理工学院计算机科学与人工智能实验室 (CSAIL) 的共同主要作者和研究生。
“这项工作的想法是,我们可以采用任何可以 3D 打印的材料,并有一种简单的方法来在其中布置通道,这样我们就可以通过结构获得传感。 如果你使用非常复杂的材料,那么你就可以将运动、感知和结构融为一体,”Chin 说。
该论文的共同主要作者还包括前 CSAIL 博士后、现任西北大学助理教授 Ryan Truby; 张安南,CSAIL研究生; 资深作者 Daniela Rus,电气工程和计算机科学系 Andrew 和 Erna Viterbi 教授兼 CSAIL 主任。
该研究发表于 科学进展.
3D打印技术
该团队依靠 3D 打印将充气通道直接整合到形成晶格的支柱中。 当结构发生运动或受到挤压时,通道会变形,内部空气体积也会发生变化。 这一过程使研究人员能够使用现成的压力传感器测量相应的压力变化,从而提供有关材料变形情况的反馈。
“如果你拉长橡皮筋,需要一点时间才能恢复原状。 但由于我们使用的是空气并且变形相对稳定,因此我们无法获得这些相同的随时间变化的属性。 来自我们传感器的信息更加清晰。”Chin 说道。
该团队使用数字光处理 3D 打印将通道整合到结构中。 该方法包括将结构从树脂池中拉出,并使用投射光硬化成精确的形状。 然后将图像投影到湿树脂上,并固化受光照射的区域。
随着过程进一步进行,粘性树脂会滴落并卡在通道内,这意味着团队必须在固化之前去除多余的树脂。 他们通过结合压缩空气、真空和复杂的清洁来做到这一点。
“我们必须从设计方面进行更多的集思广益,以考虑清洁过程,因为这是主要的挑战,”Chin 继续说道。
该团队利用这一过程创建了几种晶格结构,并演示了当结构受到挤压或弯曲时,充满空气的通道如何产生清晰的反馈。
HSA软体机器人
研究小组还将传感器集成到手动剪切拉胀材料 (HSA) 中,这是为机动软机器人开发的一类新型材料。 HSA 可以同时拉伸和扭曲,使它们能够充当有效的软机器人执行器。 然而,HSA 由于其复杂的形式而难以“感知”。
该团队 3D 打印了其中一台 HSA 软机器人,它能够执行弯曲和扭转等各种动作。 然后它经历了超过 18 个小时的一系列运动,传感器数据被用来训练可以准确预测机器人运动的神经网络。
“材料科学家一直在努力优化建筑材料的功能。 这似乎是一个简单但非常强大的想法,可以将这些研究人员一直在做的事情与这个感知领域联系起来。 一旦我们添加传感功能,像我这样的机器人专家就可以进来并将其用作主动材料,而不仅仅是被动材料,”Chin 说。
“使用连续的类皮肤传感器对软机器人进行传感一直是该领域的一个公开挑战。 这种新方法为软机器人提供了准确的本体感受能力,并为通过触摸探索世界打开了大门。”Rus 继续说道。
Chin 和他的团队表示,此类技术的未来可能会带来诸如针对特定球员头部量身定制的足球头盔之类的产品。 这些头盔的内部结构具有传感功能,可提高现场碰撞反馈的准确性。















