
Robotika
Mobilni sistem za polnjenje avtonomnih robotov, ki jim primanjkuje energije
Ruski raziskovalci so razvili prototip robota, ki je sposoben izvajati ad hoc polnilne misije za kmetijske in industrijske robote, katerih avtonomija je sicer omejena zaradi pomanjkanja električnih vtičnic, in ki vsebuje tudi predlagani standard za konfiguracijo vtiča/vtičnice za polnjenje, ki se uporablja za mobilne robotske sisteme.
Prototip za 'MobileCharger', je pokazala, v nedavnem dokumentu Inštituta za znanost in tehnologijo Skolkovo v Moskvi je opremljen z mehanizmom za vklop, ki ni drugačen od širokih povezovalnih zmogljivosti vojaških sistemov za zračni promet, zasnovanih za oskrbo z gorivom med letom.
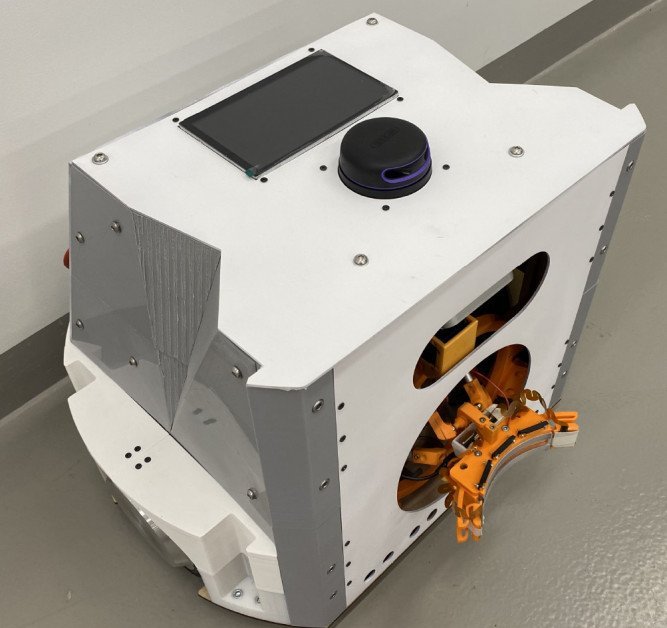
Prototipni robot MobileCharger. Vir: https://arxiv.org/pdf/2107.10585.pdf
MobileCharger poskuša izboljšati podobne pobude zadnjih let, kot sta Volkswagnov mobilni polnilni robot 'Laderoboter' in Samsungov EVAR Recharging Robot na več načinov: z boljšim kompromisom med težo in zmogljivostjo; z zmanjšanjem prostorskih zahtev za postopke polnjenja (slabost EVAR); z uporabo konvolucijskih nevronskih mrež (CNN) za optimizacijo delovanja sodelovanja; in z uporabo vrste senzorjev, vključno z LiDAR in taktilnimi senzorji za oceno relativnega položaja robota, ki ga je treba napolniti.

Sistem za priklop ima relativno svobodo gibanja v treh smereh, da se prilagodi različnim zasnovam terenskih robotov in upošteva okolja, ki imajo lahko bolj neenak teren kot ravne površine tovarniških tal.
Postopki polnjenja naj bi trajali približno štiri ure z doslednim prenosom 22 voltov. Med postopkom je bistvenega pomena, da fizična povezava ostane dosledna, saj bo vodoravna ali navpična neporavnanost zelo verjetno povzročila poškodbe enega ali obeh robotov z možnostjo neozemljene električne razelektritve.
Obrnjeni delta aktuator, predstavljen v MobileChargerju, ponuja boljšo delovno hitrost kot nedavne rešitve za scenarije polnjenja na terenu, pri čemer raziskovalci trdijo, da bo njegovo kompaktno in razločno zasnovo lažje izdelati.

Delta aktuator ima tudi magnetno zaklepanje, čeprav to samo po sebi ne bi zadostovalo za ohranjanje varnega stika med ponovnim polnjenjem, podpira pa ga več komplementarnih pristopov, vključno z nastavitvenim obročem in končnim efektorjem z elektrodami in servomotorji.
Oblikovno-agnostično polnjenje
MobileCharger ni zasnovan tako, da bi imel popolno poznavanje domene vsakega robota, ki bi ga morda moral ponovno napolniti, ampak bo namesto tega uporabil vrsto metod za identifikacijo združljive polnilne vtičnice nekje na ohišju robota in se manevriral v bližino, ki omogoča da se poveže s ciljnim robotom.
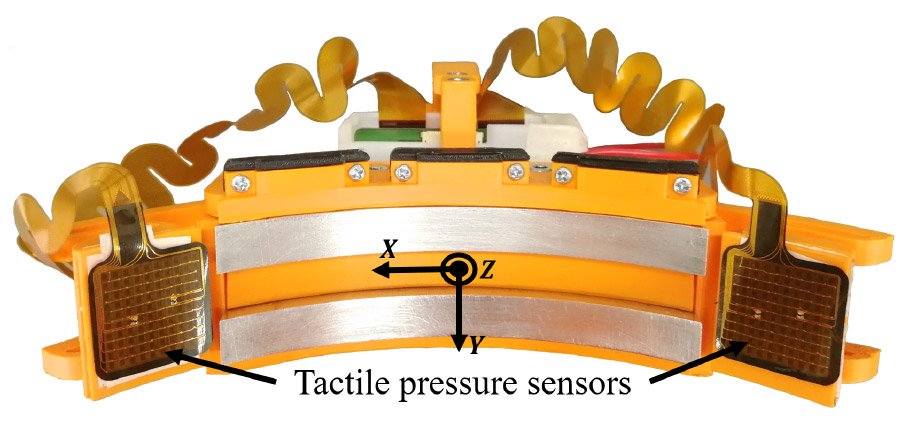
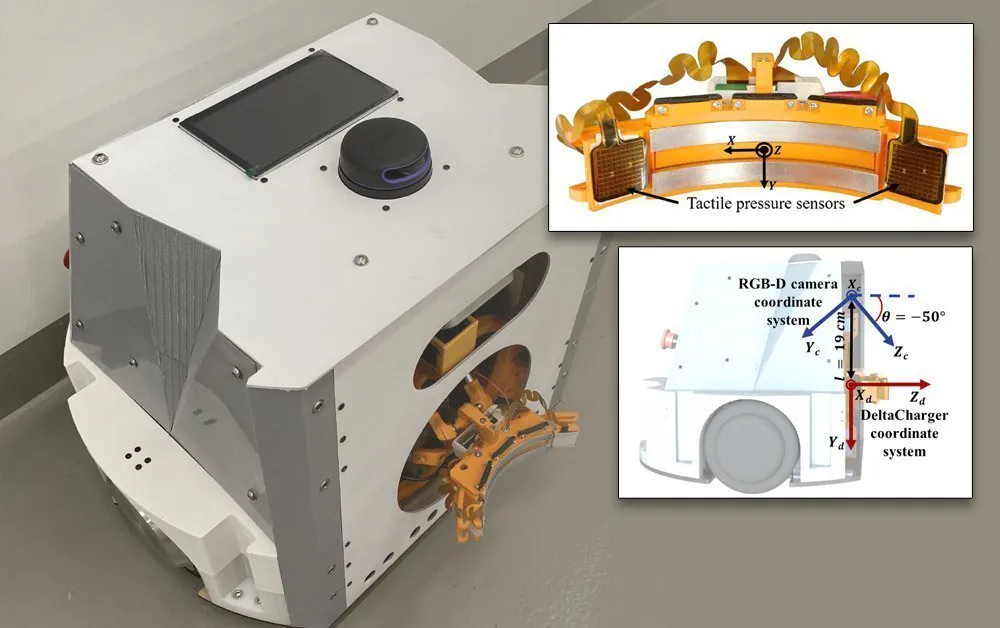
Niz taktilnih senzorjev tlaka v priklopnem mehanizmu MobileChargerja.
Učinkovito MobileCharger ponuja paleto rešitev za izziv ocenjevanja poravnave in doslednega delovanja, vključno s sistemi računalniškega vida RGB-D (z omogočeno globino) robotov za obiranje sadja in na pritisk občutljivih taktilnih in haptičnih povratnih sistemov zaprtih industrijskih robotov.
Prepoznavanje slike
Skener LiDAR podjetja MobileCharger je podprt z Intel RealSense D435 RGB globinska kamera za oceno bližine, ki služi tudi kot dovodni mehanizem za robotove zmogljivosti ocenjevanja stikov, ki temeljijo na CNN.
Sistem za zaznavanje predmetov, ki ga uporablja MobileCharger, temelji na YOLOv3, učinkovitem sistemu za prepoznavanje slik v realnem času s 106 plastmi, ki ga poganja po meri prilagojen nabor podatkov, osredotočen na predlagano zasnovo polnilne postaje.
Nabor podatkov vsebuje 170 vzorcev, razdeljenih med 120 za usposabljanje in 50 v testnih nizih, izdelanih v različnih svetlobnih pogojih, in lestvico variacij odklona od 75 do 105 stopinj. Slike v naboru podatkov za usposabljanje so v ločljivosti 840 × 480 in vsebujejo podatke o RGB in globini.
Konvolucijska nevronska mreža
CNN, ki se uporablja v MobileChargerju, obravnava vprašanje doslednega stika med postopkom polnjenja in se napaja z dvema prilagojenima nizoma podatkov: prvi nabor podatkov vsebuje podatke o kotni neusklajenosti med elektrodama, s 600 pari podatkov, pridobljenimi iz mehanizmov taktilnih senzorjev; drugi nabor podatkov obravnava vodoravno in navpično neusklajenost končnega efektorja (nabojni sklop) in vsebuje 500 podatkovnih parov.
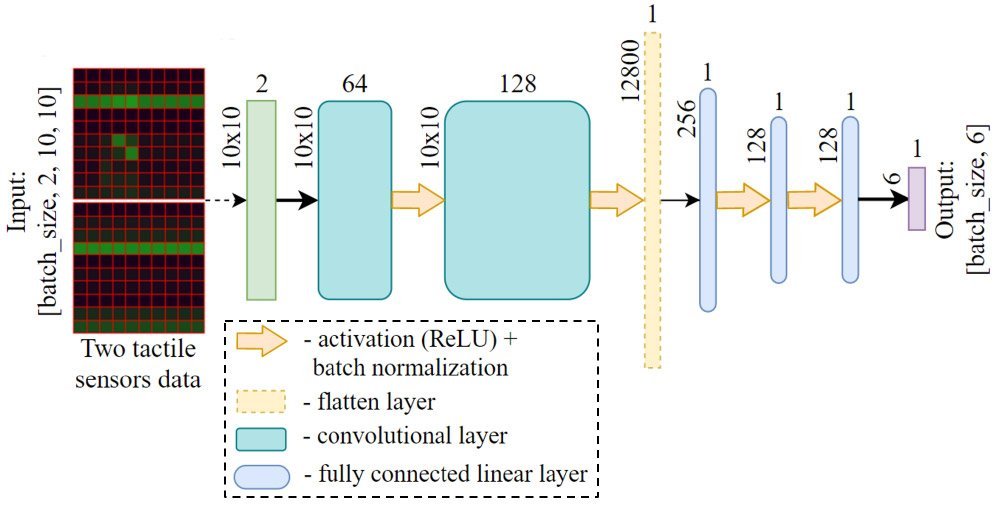
Arhitektura CNN za doslednost razumevanja.
Podatki so bili razdeljeni na 67 % naborov za usposabljanje in 33 % ocenjevalnih sklopov, pri čemer je bila ciljna metrika natančnost.
Preden so se odločili za metodo CNN/YOLO, so raziskovalci razmišljali o uporabi histograma usmerjenih gradientov (HoG) s podpornim vektorskim strojem (SVM) in tudi zaznavanju kontur z detektorjem robov Canny. Nobena metoda se ni štela za ustrezno odporno na izzive operacij polnjenja na terenu.
SwarmCharge
Sistem MobileCharger je namenjen notranjim in zunanjim okoljem, prihodnje delo raziskovalcev pa bo obravnavalo razvoj lokalizacije in algoritmov za preslikavo. 1-Dof bodo raziskani tudi kot dodatni pripomoček za vrtenje elektrod v osi valja povezovalnega mehanizma.
Kot bi lahko pričakovali, je lastniški povezovalni sistem sčasoma namenjen širši ekostrukturi robotov in avtonomnih naprav, za katere piše, da se bodo imenovale SwarmCharge. MobileCharger naj bi bil podporni sistem za najrazličnejše vrste robotov, vključno s humanoidnimi, štirinožnimi in UAV mehanizmi.















