Robotică
Roboții merg mai repede cu tălpi flexibile nou dezvoltate
Roboțiiștii de la Universitatea California San Diego au dezvoltat tălpi flexibile pentru roboți. Noua tehnologie poate rezulta în roboți care merg cu 40 la sută mai repede pe terenuri accidentate, cum ar fi pietrele și așchiile de lemn.
Noua dezvoltare este importantă pentru o varietate de aplicații diferite, în special pentru misiunile de căutare și salvare.
Cercetarea va fi prezentată la conferința RoboSoft, care va fi virtuală și va avea loc între 15 mai și 15 iulie 2020.
Emily Lathrop este studentă doctorandă la Școala de Inginerie Jacobs de la UC San Diego și este primul autor al lucrării.
„Roboții trebuie să poată merge repede și eficient pe teren natural, accidentat, astfel încât să poată merge peste tot unde pot merge oamenii, dar poate că nu ar trebui”, a spus Lathrop.
Michael T. Tolley este profesor în Departamentul de Inginerie Mecanică și Aerospațială de la UC San Diego. El este autorul senior al lucrării.
“De obicei, roboții pot controla mișcarea doar la articulații specifice”, a spus Tolley. “În această lucrare, am demonstrat că un robot care poate controla rigiditatea și, prin urmare, forma tălpii sale, depășește proiectele tradiționale și poate adapta o varietate largă de terenuri”.
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Tălpi robotice flexibile
Tălpile robotice flexibile constau într-o membrană de latex umplută cu boabe de cafea. Boabele de cafea pot trece înapoi și înainte între a fi solide și lichide. Mecanismul care permite mediilor granulare, cum ar fi boabele de cafea, să se comporte astfel se numește blocare granulară. Ca rezultat, roboții pot merge mai repede și au o priză mai bună.
Când tălpile robotului ating solul, ele se întăresc și se conformează suprafeței pentru a stabili o bază solidă. Când se mișcă, tălpile se deblochează și se relaxează între pași, iar structurile de susținere sunt folosite pentru a le ajuta să rămână flexibile în timp ce sunt blocate.
Aceste tălpi flexibile au fost primele de acest fel care au fost testate pe suprafețe accidentate.

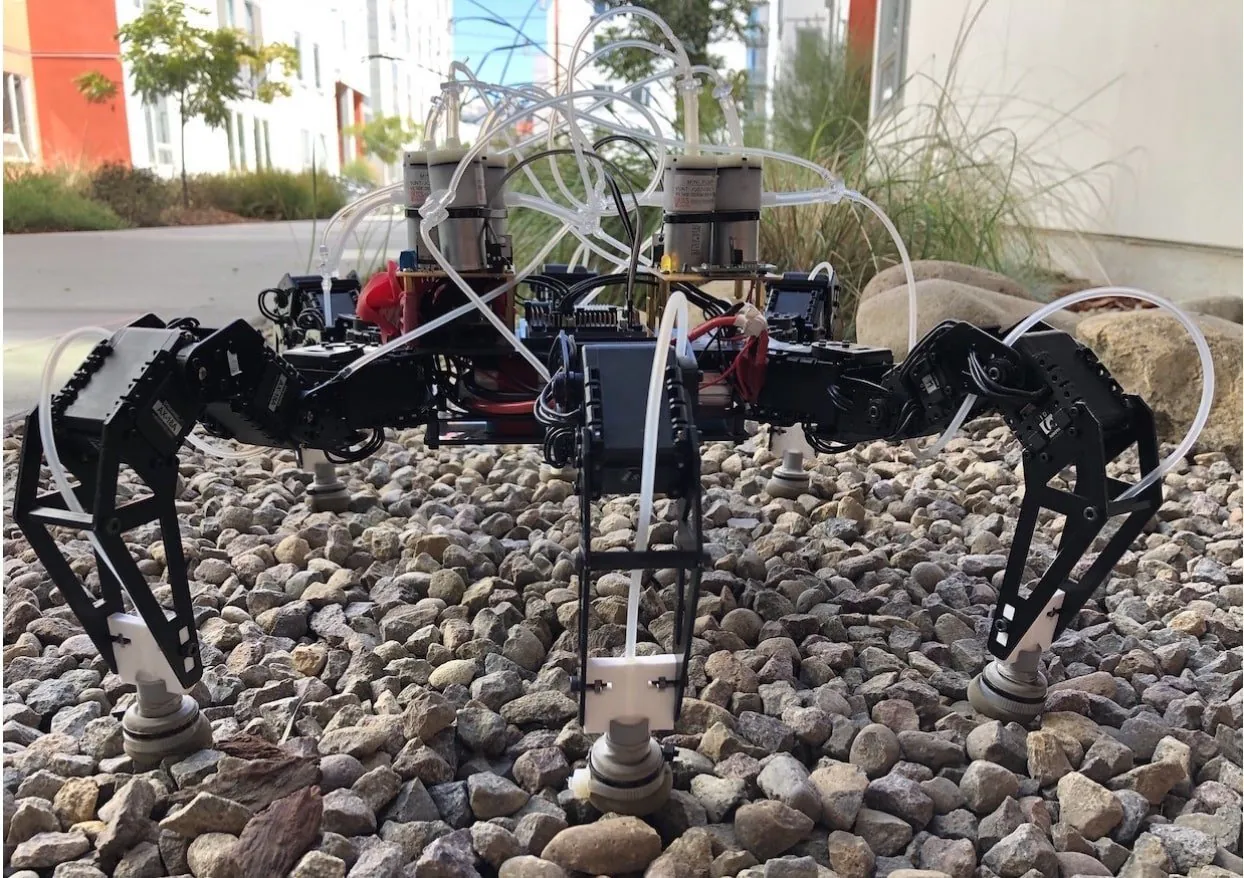
Cercetătorii au instalat tălpile pe un robot hexapod și au proiectat și construit un sistem de bord. Sistemul de bord este capabil să genereze presiune negativă și presiune pozitivă pentru a debloca și bloca tălpile între fiecare pas. Pentru a bloca tălpile, o pompă de vid îndepărtează aerul dintre boabele de cafea. Ele pot fi, de asemenea, blocate pasiv dacă greutatea robotului împinge aerul afară din boabele de cafea.
Suprafețe accidentate
Robotul a fost testat mergând pe o varietate de suprafețe diferite, inclusiv sol plat, așchiile de lemn și pietrele, cu și fără tălpi flexibile. Rezultatele au arătat că blocarea pasivă este cea mai eficientă pe sol plat și blocarea activă este cea mai bună pe pietre libere.
Cu tălpi flexibile, picioarele robotului au putut să apuce solul mai bine, ceea ce a crescut viteza sa. Acest lucru a fost valabil în special atunci când robotul a mers pe pante și terenuri accidentate.
Nick Gravish este profesor în Departamentul de Inginerie Mecanică și Aerospațială de la UC San Diego și coautor al studiului.
“Lumea naturală este plină de terenuri dificile pentru roboții care merg – suprafețe alunecoase, stâncoase și moi fac mersul complicat”, a spus Gravish. “Tălpi care pot adapta la aceste tipuri diferite de sol pot ajuta roboții să îmbunătățească mobilitatea”.
Cercetătorii vor încerca acum să incorporeze senzori moi pe partea inferioară a tălpiilor, care vor permite utilizarea unei plăci de control electronice. Placa de control electronică va identifica tipul de sol pe care robotul urmează să meargă și dacă tălpile trebuie să fie blocate activ sau pasiv. Cercetătorii vor continua, de asemenea, să îmbunătățească algoritmii de proiectare și control pentru o mai bună eficiență.












