
Robotica
Inginerii dezvoltă un instrument pentru a îmbunătăți orice sistem robotic autonom
O echipă de ingineri de la MIT a dezvoltat un cod de optimizare pentru îmbunătățirea oricărui sistem robotic autonom. Codul identifică automat cum și unde să modifice un sistem pentru a îmbunătăți performanța unui robot.
inginerii constatările vor fi prezentate la conferința anuală Robotics: Science and Systems din New York. Echipa a inclus Charles Dawson, student absolvent al MIT, și ChuChu Fan, profesor asistent la Departamentul de Aeronautică și Astronautică al MIT.
Proiectare AI și sisteme robotizate
Inteligența artificială (AI) și sistemele robotizate sunt utilizate într-o gamă largă de industrii, iar fiecare sistem este rezultatul unui proces de proiectare specific unui anumit sistem. Pentru a proiecta un robot autonom, inginerii se bazează pe simulări de încercare și eroare, care sunt adesea informate de intuiție. În același timp, simulările sunt adaptate la componentele specifice ale robotului și sarcinile sale desemnate, ceea ce înseamnă că nu există o „rețetă” adevărată pentru a asigura un rezultat de succes.
Inginerii MIT schimbă acest lucru cu noul lor instrument de proiectare generală pentru robotiști. Ei au dezvoltat un cod de optimizare care poate fi aplicat la simulările aproape oricărui sistem robotic autonom și ajută la identificarea automată a modalităților în care performanța unui robot poate fi îmbunătățită.
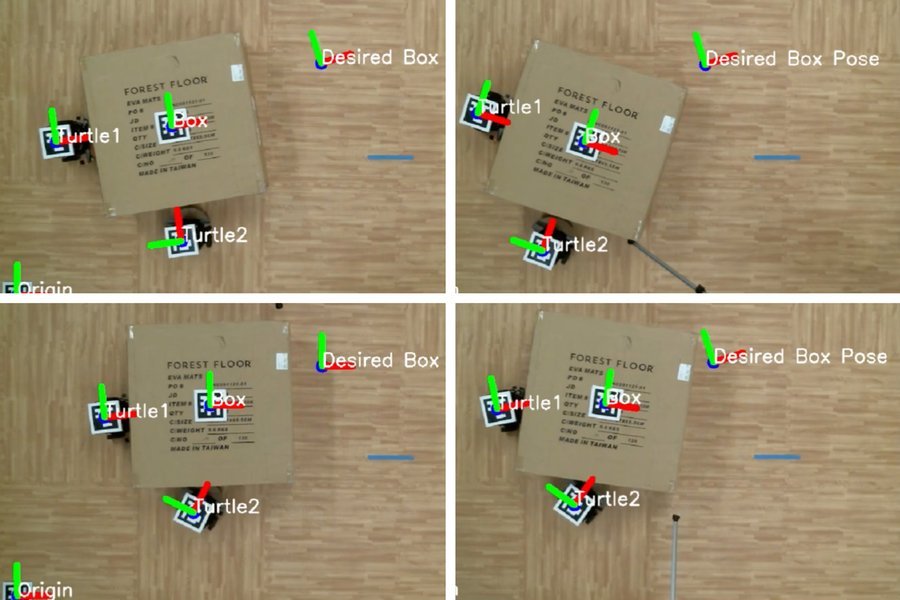
Instrumentul a demonstrat capacitatea de a îmbunătăți performanța a două sisteme autonome foarte diferite. Primul a fost un robot care a navigat pe o cale între două obstacole, iar celălalt a fost o pereche de roboți care au lucrat împreună pentru a muta o cutie grea.
Potrivit cercetătorilor, acest nou optimizator de uz general ar putea ajuta la accelerarea dezvoltării unei game largi de sisteme autonome, cum ar fi roboții de mers pe jos sau vehiculele autonome.
Dawson și Fan au spus că și-au dat seama de necesitatea acestui tip de instrumente după ce au observat diferitele alte instrumente de proiectare automatizate disponibile pentru alte discipline de inginerie.
„Dacă un inginer mecanic dorea să proiecteze o turbină eoliană, ar putea folosi un instrument CAD 3D pentru a proiecta structura, apoi ar putea folosi un instrument de analiză cu elemente finite pentru a verifica dacă va rezista la anumite sarcini”, spune Dawson. „Cu toate acestea, există o lipsă a acestor instrumente de proiectare asistată de computer pentru sisteme autonome.”
Pentru a optimiza un sistem autonom, un robotician de obicei dezvoltă mai întâi o simulare a sistemului și a subsistemelor sale care interacționează înainte de a lua anumiți parametri ai fiecărei componente. Simularea este apoi rulată înainte pentru a vedea cum ar funcționa sistemul.
Mai multe procese de încercare și eroare trebuie să fie executate înainte de a putea fi determinată combinația optimă de ingrediente, iar acesta este un efort care necesită timp.
„În loc să spui: „Având în vedere un design, care este performanța?” am vrut să inversăm acest lucru pentru a spune: „Având în vedere performanța pe care vrem să o vedem, care este designul care ne duce acolo?””, spune Dawson.
Cadrul de optimizare, sau codul computerului, a fost conceput pentru a găsi automat ajustări care pot fi făcute unui sistem existent. Codul se bazează pe diferențierea automată, care este un instrument de programare utilizat inițial pentru antrenarea rețelelor neuronale. Denumită și „autodiff”, această tehnică ajută rapid și eficient la „evaluarea derivatei” sau a sensibilității la modificarea oricărui parametru.
„Metoda noastră ne spune automat cum să facem pași mici de la un design inițial la un design care ne atinge obiectivele”, spune Dawson. „Folosim autodiff pentru a explora, în esență, codul care definește un simulator și pentru a descoperi cum să facem automat această inversare.”

Testarea instrumentului
Instrumentul a fost testat pe două sisteme robotice autonome separate și a îmbunătățit performanța fiecărui sistem în experimentele de laborator. În timp ce primul sistem cuprindea un robot cu roți conceput pentru a planifica o cale între două obstacole, al doilea sistem a fost cu adevărat impresionant.
Al doilea sistem a fost mai complex, cu două roboți care lucrează împreună pentru a împinge o cutie către o poziție țintă, ceea ce înseamnă că simularea a inclus mulți mai mulți parametri. Instrumentul a putut identifica eficient pașii necesari roboților pentru a-și îndeplini sarcina, iar procesul de optimizare a fost de 20 de ori mai rapid decât tehnicile convenționale.
„Dacă sistemul dumneavoastră are mai mulți parametri de optimizat, instrumentul nostru se poate descurca și mai bine și poate economisi exponențial mai mult timp”, spune Fan. „Este practic o alegere combinatorie: pe măsură ce numărul de parametri crește, la fel și alegerile, iar abordarea noastră poate reduce acest lucru dintr-o singură lovitură.”
Optimizatorul general este disponibil pentru descărcare, iar echipa va căuta acum să-l rafineze și mai mult, ceea ce îl va face util pentru sisteme mai complexe.
„Obiectivul nostru este să dăm oamenilor putere să construiască roboți mai buni”, spune Dawson. „Oferim un nou bloc pentru optimizarea sistemului lor, astfel încât să nu fie nevoiți să înceapă de la zero.”















