Robotikk
Robotene går raskere med nyutviklede fleksible føtter
Roboticists ved University of California San Diego har utviklet fleksible føtter for roboter. Den nye teknologien kan føre til at robotene går 40 prosent raskere på ujevn terreng som stein og treflis.
Den nye utviklingen er viktig for en rekke forskjellige anvendelser, spesielt rednings- og letingsoppdrag.
Forskningen vil bli presentert på RoboSoft-konferansen, som vil være virtuell og finne sted mellom 15. mai og 15. juli 2020.
Emily Lathrop er en Ph.D.-student ved Jacobs School of Engineering ved UC San Diego og første forfatter av artikkelen.
“Robotene må kunne gå raskt og effektivt på naturlig, ujevn terreng så de kan gå overalt mennesker kan gå, men kanskje ikke bør,” sa Lathrop.
Michael T. Tolley er en professor i avdelingen for mekanisk og romfartsteknikk ved UC San Diego. Han er seniorforfatter av artikkelen.
“Vanligvis kan roboter bare kontrollere bevegelse i bestemte ledd,” sa Tolley. “I dette arbeidet viste vi at en robot som kan kontrollere stivheten, og dermed formen, på føttene sine overgår tradisjonelle design og kan tilpasse seg en rekke forskjellige terreng.”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Fleksible robotføtter
De fleksible robotføttene består av en latexmembran som er fylt med kaffegrut. Kaffegrut kan gå frem og tilbake mellom å være fast og flytende. Mekanismen som gjør at granulære medier, som kaffegrut, kan oppføre seg på denne måten kalles granulær jamming. Dette gjør at robotene kan gå raskere og har bedre grep.
Når robotføttene berører bakken, blir de faste og former seg etter overflaten for å etablere fast fotfeste. Når de beveger seg, løsner føttene opp og blir slakkere mellom skrittene, og støttekonstruksjoner brukes for å hjelpe dem med å forbli fleksible mens de er jammet.
Disse fleksible føttene var de første av sitt slag som ble testet på ujevn overflate.

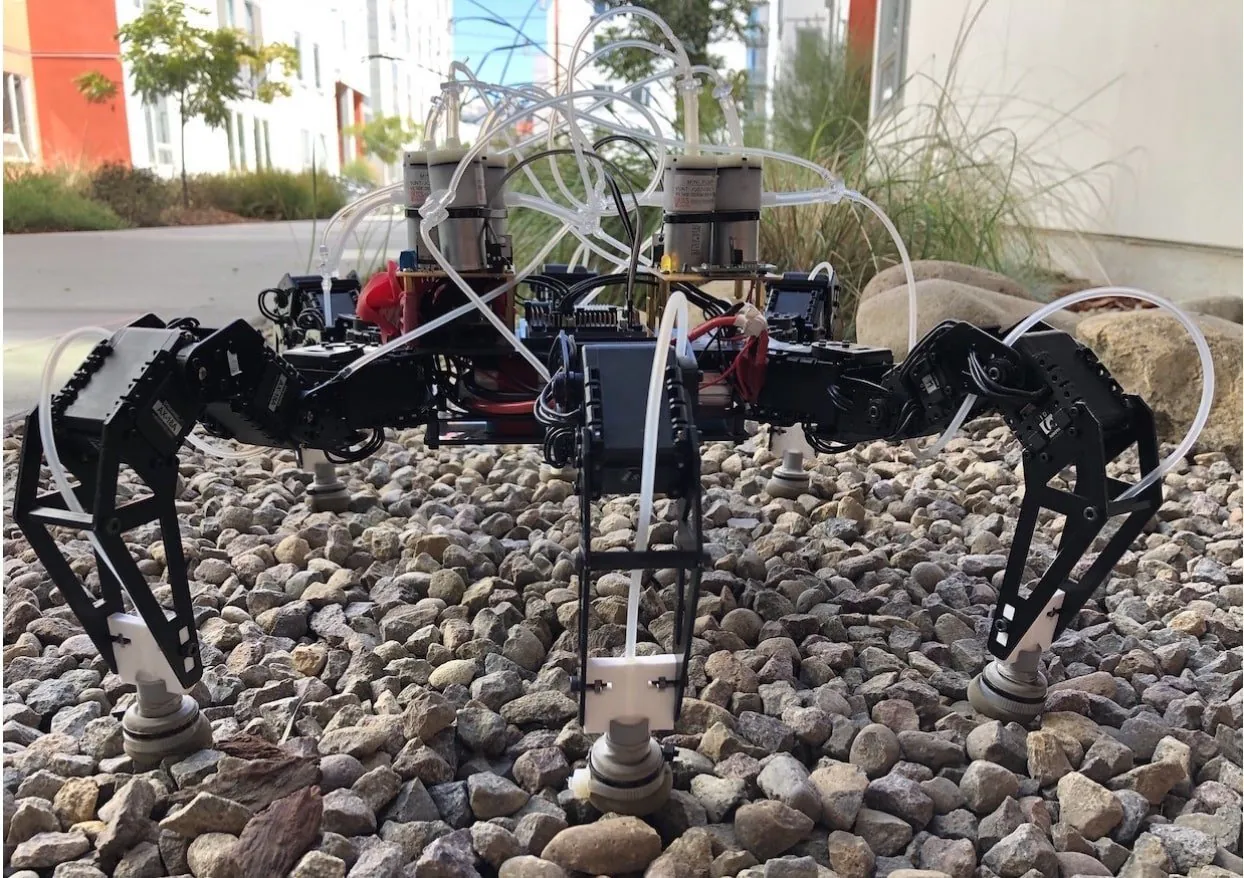
Forskerne installerte føttene på en hexapod-robot, og de designet og bygde et onboard-system. Onboard-systemet er i stand til å generere negativt trykk og positivt trykk for å løsne og jamme føttene mellom hvert skritt. For å jamme føttene, fjerner en vakuum-pumpe luften mellom kaffegrut. De kan også være passivt jammet hvis vekten av roboten tvinger luften ut fra mellom kaffegrut.
Ujevn overflate
Roboten ble testet på å gå på en rekke forskjellige overflater, inkludert flatt terreng, treflis og stein, med og uten de fleksible føttene. Funnet var at passiv jamming er mest effektiv på flatt terreng og aktiv jamming er best på løse steiner.
Med de fleksible føttene, kunne robotens ben gripe bakken bedre, noe som økte hastigheten. Dette var spesielt sant når roboten gikk oppover og på ujevn terreng.
Nick Gravish er en professor i UC San Diego Department of Mechanical and Aerospace Engineering og medforfatter av studien.
“Den naturlige verden er full av utfordringer for gående roboter – glatte, steinete og myke underlag gjør ganging komplisert,” sa Gravish. “Føtter som kan tilpasse seg disse forskjellige typene bakke kan hjelpe robotene med å forbedre mobiliteten.”
Forskerne vil nå prøve å inkorporere myke sensorer på bunnen av føttene, som vil tillate en elektronisk kontrollenhet å bli brukt. Den elektroniske kontrollenheten ville identifisere typen bakke som roboten skal gå over og om føttene må være aktivt eller passivt jammet. Forskerne vil også fortsette å forbedre design og kontrollalgoritmer for bedre effektivitet.












