Robotikk
Læringsmetode gjør det mulig for roboter å lære ved å se på mennesker
En ny læringsmetode utviklet av forskere ved Carnegie Mellon University (CMU) gjør det mulig for roboter å lære direkte fra videoer av menneskelige interaksjoner og generalisere informasjonen til nye oppgaver, noe som hjelper dem å lære hvordan de kan utføre husholdsoppgaver. Læringsmetoden kalles WHIRL, som står for In-the-wild Human Imitating Robot Learning, og den hjelper roboten å observere oppgavene og samle inn video-data for til slutt å lære hvordan den kan fullføre jobben selv.
Forskningen ble presentert på Robotics: Science and Systems-konferansen i New York.
Imitasjon som en måte å lære
Shikhar Bahl er en ph.d.-student ved Robotics Institute (RI) ved Carnegie Mellon Universitys School of Computer Science.
“Imitasjon er en god måte å lære,” sa Bahl. “Å få roboter til å lære direkte fra å se på mennesker er et uløst problem i feltet, men denne arbeiden tar et betydelig skritt i å muliggjøre denne evnen.”
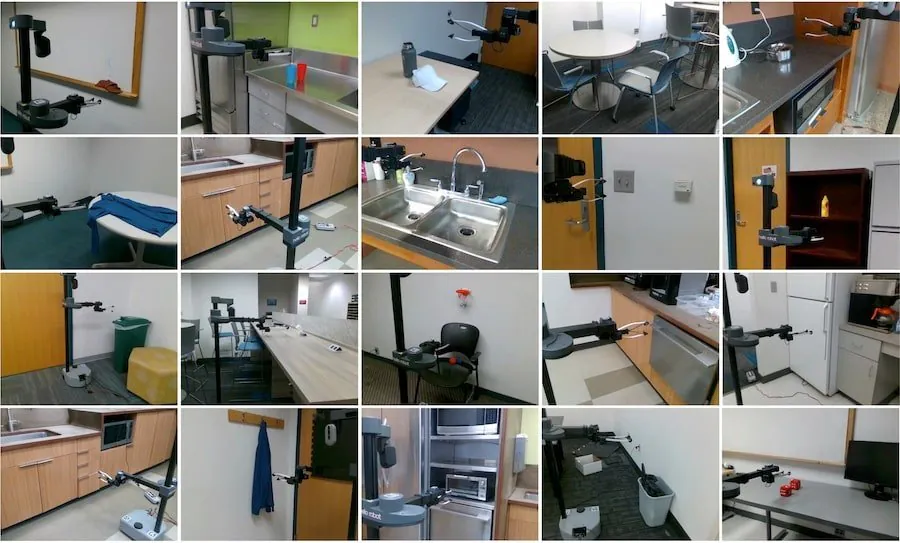
Bahl arbeidet sammen med Deepak Pathak og Abhinav Gupta, som begge er ansatte ved RI. Teamet la til en kamera og sin programvare til en standard-robot som lærte hvordan den kunne fullføre over 20 oppgaver. Disse oppgavene inkluderte alt fra å åpne og lukke apparater til å ta ut en søppelsekk fra søppelbøtten. Hver gang roboten så en menneske fullføre oppgavene før den forsøkte å gjøre det selv.
Pathak er en assistant professor ved RI.
“Dette arbeidet presenterer en måte å bringe roboter inn i hjemmet,” sa Pathak. “I stedet for å vente på at roboter blir programmert eller trent for å fullføre ulike oppgaver før de deployeres i folks hjem, gjør denne teknologien det mulig å deployere robotene og la dem lære hvordan de kan fullføre oppgaver, samtidig som de tilpasser seg sine omgivelser og forbedrer seg bare ved å se.”
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL vs. nåværende metoder
De fleste nåværende metoder for å lære en robot en oppgave baserer seg på imitasjon eller forsterkingslæring. Med imitasjonslæring opererer mennesker manuelt en robot og lærer den hvordan den kan fullføre en oppgave, noe som krever å bli gjennomført flere ganger før roboten lærer. Med forsterkingslæring blir roboten vanligvis trent på millioner av eksempler i simulering før treningen tilpasses den virkelige verden.
Begge disse modellene er effektive til å lære en robot en enkelt oppgave i en strukturert miljø, men de viser seg å være vanskelige å skalerer og deployere. Men med WHIRL kan en robot lære fra noen videoer av en menneske som fullfører en oppgave. Det er også lett skalerbart, ikke begrenset til en bestemt oppgave, og kan operere i hjemmemiljøer.
WHIRL gjør det mulig for roboter å fullføre oppgaver i sine naturlige miljøer. Og selv om de første forsøkene vanligvis ender i feil, kan den lære veldig raskt etter bare noen få suksesser. Roboten fullfører ikke alltid oppgaven med de samme bevegelsene som et menneske, men det er fordi den har andre deler som beveger seg annerledes. Med det sagt, er slutresultatet av å fullføre oppgavene alltid det samme.
“For å skalerer robotikk i villmarken, må dataene være pålitelige og stabile, og robotene bør bli bedre i sine miljøer ved å øve på egen hånd,” sa Pathak.
