로보틱스
로봇이 새로운 유연한 발을 개발하여 더 빠르게 걸을 수 있다
캘리포니아 샌디에고 대학교의 로봇공학자들은 로봇을 위한 유연한 발을 개발했다. 새로운 기술로 인해 로봇은 자갈이나 목조 쐐기와 같은 불규칙한 지형에서 40% 더 빠르게 걸을 수 있다.
새로운 개발은 특히 탐색 및 구조 임무와 같은 다양한 응용 분야에 중요하다.
이 연구는 RoboSoft 컨퍼런스에서 발표될 예정이며, 2020년 5월 15일부터 7월 15일까지 가상으로 개최될 예정이다.
Emily Lathrop는 UC 샌디에고의 Jacobs School of Engineering에서 박사 과정 학생이며 이 논문의 첫 번째 저자이다.
“로봇은 인간이 갈 수 있는 모든 곳을 걸을 수 있어야 하지만, 인간이 가지 않아야 하는 곳도 걸을 수 있어야 한다. 로봇이 자연스럽고 불규칙한 지형에서 빠르고 효율적으로 걸을 수 있도록 해야 한다”라고 Lathrop는 말했다.
Michael T. Tolley는 UC 샌디에고의 기계 및 항공공학부 교수이며, 이 논문의 공동 저자이다.
“로봇은 일반적으로 특정 관절의 운동만을 제어할 수 있다”라고 Tolley는 말했다. “이 연구에서 우리는 로봇이 발의 강度와 모양을 제어할 수 있는 경우 전통적인 설계보다 우수하며 다양한 지형에 적응할 수 있음을 보여주었다”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
유연한 로봇 발
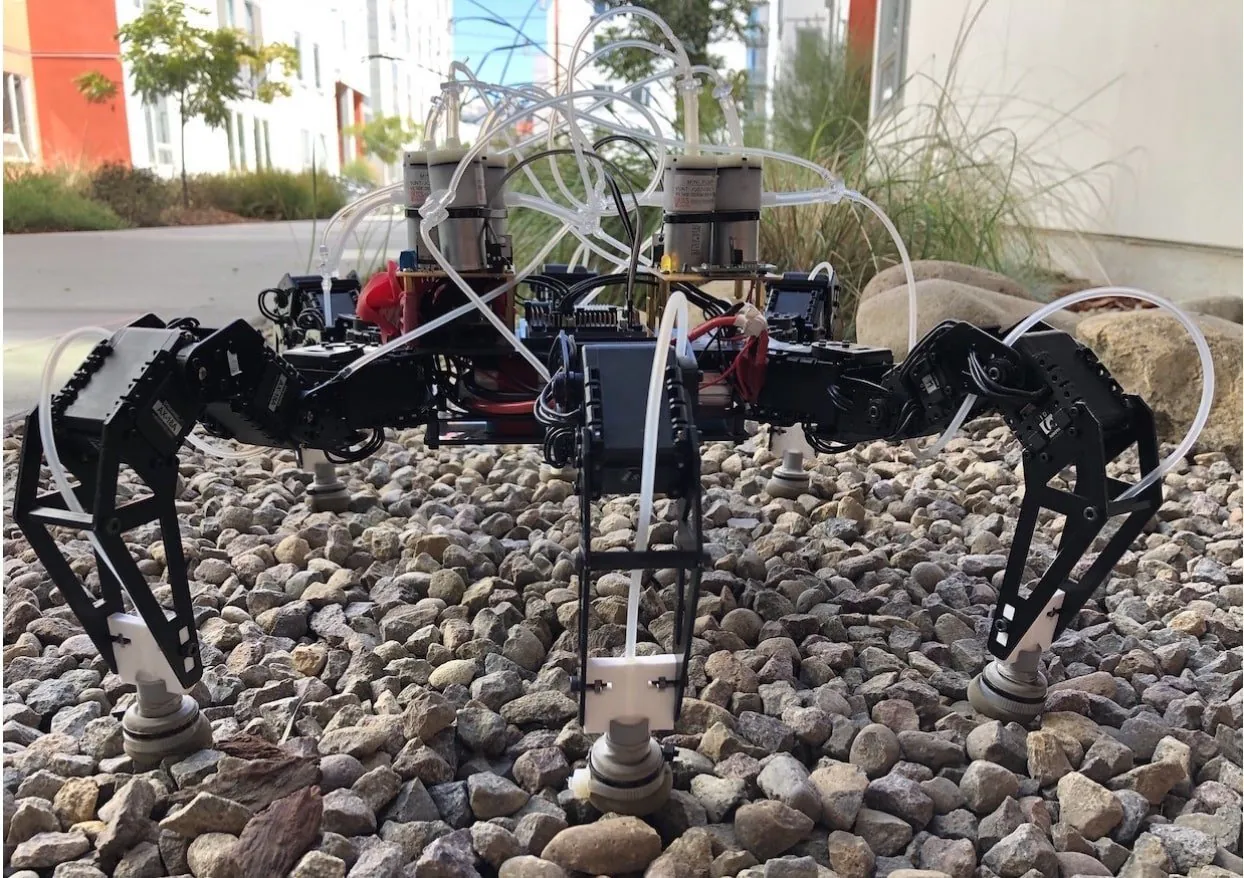
유연한 로봇 발은 라텍스 멤브레인으로 구성되어 있으며, 그 안에는 커피 가루가 들어 있다. 커피 가루는 고체와 액체 사이를 오갈 수 있다. 이와 같은 작용을 가능하게 하는 메커니즘은 과립 제동이라고 한다. 결과적으로 로봇은 더 빠르게 걸을 수 있고, 지면을 더 잘抓을 수 있다.
로봇 발이 지면에 닿으면, 그것은 단단해지고 지면에 맞게 변형되어 안정적인 발판을 마련한다. 로봇이 이동할 때, 발은 발 사이에서 풀리고 느슨해지며, 지지 구조가 발을 유연하게 유지하도록 도와준다.
이러한 유연한 발은 처음으로 불규칙한 표면에서 테스트되었다.

연구자들은 발을 육각형 로봇에 설치하고, 발 사이에서 풀고 조이는 것을 가능하게 하는 온보드 시스템을 설계하고 구축했다. 발을 조이기 위해서는 진공 펌프가 커피 가루 사이의 공기를 제거한다. 또한 로봇의 무게가 커피 가루 사이의 공기를 밀어내면 수동적으로 조일 수 있다.
불규칙한 표면
로봇은 평면, 목조 쐐기, 자갈 등 다양한 표면에서 걸으면서 유연한 발을 사용했는지 여부에 따라 테스트되었다. 결과는 수동 제동이 평면에서 가장 효과적이며, 활성 제동이 느슨한 바위에서 가장 좋다는 것이다.
유연한 발을 사용하면 로봇의 다리가 지면을 더 잘抓을 수 있었고, 이는 로봇의 속도를 증가시켰다. 특히 로봇이 경사로와 불규칙한 지형을 걸을 때에 그렇다.
Nick Gravish는 UC 샌디에고 기계 및 항공공학부의 교수이며, 이 연구의 공동 저자이다.
“자연界는 미끄러지거나, 바위로 뒤덮인, 또는 물렁물렁한 지면으로 가득 차 있다. 이러한 다양한 지면 유형에 적응할 수 있는 발을 가진 로봇은 이동성을 향상시킬 수 있다”라고 Gravish는 말했다.
연구자들은 이제 발 밑에軟 센서를 통합하여 전자 제어 보드를 사용할 수 있도록 할 것이다. 전자 제어 보드는 로봇이 걸을 지형의 유형을 식별하고, 발이 활성화 또는 수동적으로 조여야 하는지 결정할 것이다. 연구자들은 또한 설계 및 제어 알고리즘을 개선하여 효율성을 높일 것이다.












