
רובוטיקה
ג'וק עם ציוד חיפוש והצלה התומך בינה מלאכותית
חוקרי רובוטיקה בינלאומיים פיתחו מערכת חיפוש והצלה עירונית (USAR) המשתמשת בג'וק חי 'ניתן לכיוון' כדי להעביר מערכת זיהוי ניצולי אינפרא אדום ממוזערת המאפשרת למידת מכונה דרך תרחישי אסונות בלתי ניתנים לניווט.
השמיים מערכת הוא שיתוף פעולה בין מחלקות מחקר בסינגפור, סין, גרמניה ובריטניה. הוא משתמש ב- מקק מדגסקר כרכב, ויש לו מספיק כוח לפעול למספר שעות.
מקור: https://arxiv.org/abs/2105.10869
מערכת החילוץ ההיברידית כוללת מודל למידת מכונה לזיהוי אנושי, שאומן על תמונות אינפרא אדום (IR), ומפעילה את מערכת זיהוי ה-IR הנייד, שיכולה לפעול באופן אוטונומי לפי הצורך, ומדווחת על ניצולים שנמצאו בחזרה לתחנת הפעלה בבסיס.
משאבים מקומיים מוגבלים
מסגרת למידת המכונה נדרשת לפעול על משאבים דקים במיוחד: רק 191.8kB של זיכרון RAM סטטי ו-1988kB של זיכרון פלאש נותרו למערכת מדרישות ההספק הכלליות של המכשיר, שחייבות לספק גם את הגירוי החשמלי לחרק.

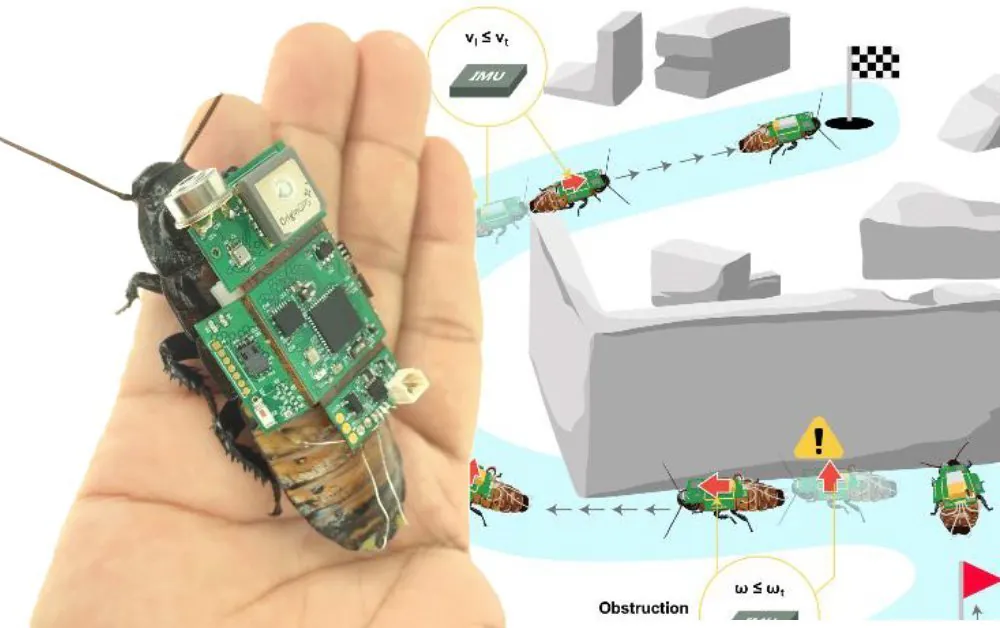
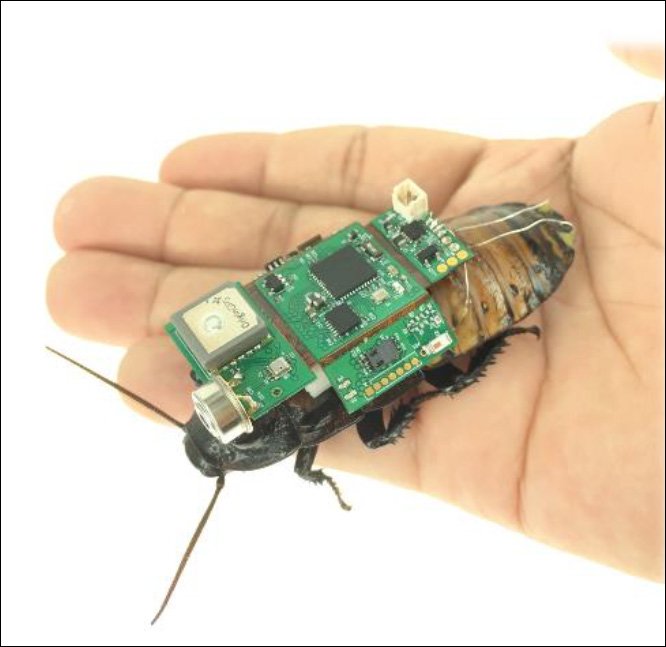
שלושת הבלוקים הפונקציונליים של תיק הגב של הג'וק, בתמונה למעלה, כוללים גירוי אלחוטי, יחידת בקר ראשי ורכיבים היקפיים, כאשר מערכת למידת המכונה הנגזרת מ-IR ופונקציונליות הניווט מוטבעת ביחידת הבקר הראשית. מעגל האסדה פוצל למספר מרכיבים על מנת להתאים טוב יותר את הגיאומטריה של הג'וק.
התיקן מדגסקר (בין המין הגדול ביותר בעולם, עם קיבולת עומס מקסימלית של 15 גרם) נשלט על ידי זעזועים חשמליים קטנים המכוונים אותו לכיוון זה או אחר, מיושם על ידי ארבע אלקטרודות המושתלות באנטנות של היצור (סרצ'י), ואל בטנו. האלקטרודות מאובטחות עם שעוות דבורים.
הוספת בינה מלאכותית לחיפוש והצלת חרקים
היוזמה החדשה מפתחת עבודה קודמת של UC Berkeley והאוניברסיטה הטכנולוגית Nanyang של סינגפור, אשר הגתה לראשונה באמצעות חיפושיות ניתנות לכיוון בתרחישי USAR.

מחקר משנת 2016 לשליטה בנתיב הטיסה של חיפושית. מקור: https://www.youtube.com/watch?v=iljHXpE4LG8
למרות שלחיפושיות יש את יכולת הטיסה הנוספת, קיבולת הטעינה שלהן מופחתת לאחר מכן, מורידה את היכולות הפוטנציאליות של הטכנולוגיות המשולבות ומביאה את דרישות צריכת החשמל לרמה קריטית, במיוחד במקרה שבו יש צורך להפעיל אלגוריתם למידת מכונה.
מערכת הזיהוי האנושי האוטונומית המשולבת ביוזמה החדשה משתמשת במודל סיווג תמונה המנצל תמיכה במכונה וקטורית (SVM) ו היסטוגרמה של שיפועים מכוונים.
תנועת הג'וק מכוונת על ידי מערכת הניווט המשולבת, ומנחה את ה'ביובוט' ליעד שנקבע מראש ללא כל ידיעה על המכשולים המתערבים. לרוב, כישורי הניווט האדירים של התיקן עצמו פותרים את רוב הבעיות בהגעה למקום שלא ניתן להגיע אליו.

מקור: https://arxiv.org/abs/2105.10869
מערכת האינפרא אדום המשולבת לוכדת תמונות במהירות 1 הרץ, פועלת בהצלחה באזורים חשוכים, ומדווחת באופן אלחוטי על כל ניצולים שנמצאו למרכז פיקוד בזמן אמת. כדי לחסוך באנרגיה, מערכת ניתוח התמונה מתחילה לפעול רק אם היא מופעלת על ידי קריאת אינפרא אדום חיובית.
הדגם תופס רק 18.3kB של זיכרון פלאש ו-52.2kB של זיכרון RAM סטטי, ומשיג זמן חישוב של 95 מילישניות. זמן עיבוד סביר הוא חיוני בתרחיש של USAR, מכיוון שאחרת עלולות להחמיץ חתימות אינפרא אדום רחוקות במרווח העיבוד, כאשר התיקן משנה כיוון וחוצה שטח.
המערכת כוללת גם חיישנים לניטור טמפרטורה, לחות ו-CO2, על מנת לדווח על תנאים מקומיים לניסיון חילוץ אפשרי, ולאפשר למרכז הבקרה להרחיק את היצור מכל מצב שיסכן אותו.
בדיקה בשטחים מדומים
המערכת נבחנה בתרחיש מדומה של אסון (תמונה למעלה), עם משא ומתן יעיל על מכשולים, למעט תצורות מסוימות מאתגרות במיוחד הכרוכות בעליות סחרחורות, שכן התיקן נמצא בעמדת משקל עקב הציוד המצורף.

לארכיטקטורת הניווט הייתה בתחילה נטייה להיתקע במכשולים מכריעים, כמו מצבים שבהם אפילו הג'וק לא יכול היה להמשיך הלאה, והחוקרים פיתחו לאחר מכן מערכת ניווט משוב חזוי כדי לשפר את הביצועים מול מכשולים גבוהים. המערכת הצליחה להשיג אחוזי הצלחה של 100% בסביבות ללא מכשולים או נמוכים, ושיעור הצלחה גבוה יותר עם מכשולים גבוהים.
היכן שאכן התרחש כישלון, החוקרים מסיקים שניתן לתקן זאת על ידי הגדלת משך הניסוי, אם כי יש לכך השלכות לוגיות בתרחיש USR קריטי בזמן.
נוף אינפרא אדום
למצלמת האינפרא אדום המשולבת יש מפרט צנוע, הפועלת ב-32×32 פיקסלים עם שדה ראייה של 90 מעלות. התמונות, כשהן מופעלות, מועברות דרך מסנן חציוני של דה-noising.
המערכת משיגה שיעור הצלחה של 87% בהבחנה בין נושאים אנושיים מסוגים אחרים של חתימה תרמית, ועולה ל-90% ברדיוס קרבה של 0.5 מ' ו-1.5 מ'.
בשל אילוצי אנרגיה וגודל שבב, המחקר הראשוני אינו כולל מערכת לוקליזציה מובנית, ולכן לא ניתן לעקוב אחר מיקומו של הג'וק בזמן אמת. החוקרים מציעים שניתן ליישם חישוב מתים כפתרון לחיסכון בחשמל, עם אותות מיקום באנרגיה נמוכה שיועברו בחזרה למרכז הבקרה, ביישומים עתידיים.
חרקים כמפעילי חיפוש והצלה
עשר השנים האחרונות הביאו שפע של פרויקטים מחקריים המבקשים לנצל את החוסן וכוח הניווט של חרקים כדי ליצור מערכות היברידיות או רובוטיות טהורות לתרחישי חיפוש והצלה. מלבד העבודה הקשורה לחיפושית 2016 שקודמת ליוזמה האחרונה הזו, היו מספר ניסיונות ליצור מחדש יכולות חרקים בצורה רובוטית גרידא.
אלה כוללים פרויקט מחקר לשנת 2019 מ-UoC שהציע רובוט פשוט ארגונומי המבוסס על עקרונות של ג'וק, אחד הפרויקטים הראשונים מסוגו לטיפול בשבריריות הקיצונית של חרקי רובוטיקה.















