Robotica
Metodo di apprendimento consente ai robot di imparare guardando gli esseri umani
Un nuovo metodo di apprendimento sviluppato da ricercatori alla Carnegie Mellon University (CMU) consente ai robot di imparare direttamente da video di interazione umana e generalizzare le informazioni a nuovi compiti, aiutandoli a imparare come eseguire le faccende domestiche. Il metodo di apprendimento si chiama WHIRL, che sta per In-the-wild Human Imitating Robot Learning, e aiuta il robot a osservare i compiti e raccogliere i dati video per imparare eventualmente a completare il lavoro stesso.
La ricerca è stata presentata alla conferenza Robotics: Science and Systems di New York.
Imitazione come modo per imparare
Shikhar Bahl è uno studente di dottorato presso il Robotics Institute (RI) della School of Computer Science della Carnegie Mellon University.
“L’imitazione è un ottimo modo per imparare”, ha detto Bahl. “Far imparare ai robot guardando direttamente gli esseri umani rimane un problema irrisolto nel settore, ma questo lavoro compie un passo significativo per abilitare questa capacità.”
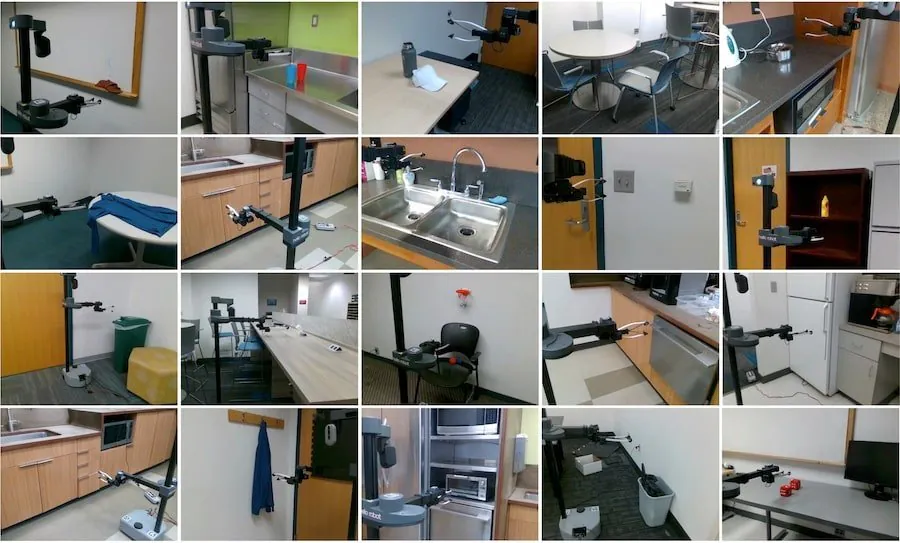
Bahl ha lavorato insieme a Deepak Pathak e Abhinav Gupta, entrambi membri della facoltà del RI. Il team ha aggiunto una telecamera e il loro software a un robot già pronto all’uso che ha imparato a completare oltre 20 compiti. Questi compiti includevano tutto, dall’aprire e chiudere elettrodomestici al rimuovere un sacchetto di spazzatura dal bidone. Ogni volta che il robot guardava un essere umano completare i compiti prima di tentare di farlo lui stesso.
Pathak è un professore assistente del RI.
“Questo lavoro presenta un modo per portare i robot nelle case”, ha detto Pathak. “Invece di aspettare che i robot siano programmato o addestrato per completare con successo diversi compiti prima di deployarli nelle case delle persone, questa tecnologia consente di deployare i robot e farli imparare a completare i compiti, adattandosi ai loro ambienti e migliorando solo guardando.”
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL vs. metodi attuali
La maggior parte dei metodi attuali per insegnare a un robot un compito si basa sull’imitazione o sull’apprendimento per rinforzo. Con l’apprendimento per imitazione, gli esseri umani operano manualmente un robot e gli insegnano come completare un compito, il che richiede essere eseguito più volte prima che il robot impari. Con l’apprendimento per rinforzo, il robot è solitamente addestrato su milioni di esempi in simulazione prima di adattare l’addestramento al mondo reale.
Mentre entrambi questi modelli sono efficienti nell’insegnare a un robot un singolo compito in un ambiente strutturato, si rivelano difficili da scalare e deployare. Ma con WHIRL, un robot può imparare da qualsiasi video di un essere umano che completa un compito. È anche facilmente scalabile, non limitato a un compito specifico e può operare in ambienti domestici.
WHIRL consente ai robot di completare i compiti nei loro ambienti naturali. E mentre i primi tentativi finivano spesso in fallimento, poteva imparare molto velocemente dopo solo pochi successi. Il robot non sempre completa il compito con gli stessi movimenti di un essere umano, ma questo è perché ha parti diverse che si muovono in modo diverso. Con ciò detto, il risultato finale del completare i compiti è sempre lo stesso.
“Per scalare la robotica nel mondo reale, i dati devono essere affidabili e stabili e i robot devono migliorare nel loro ambiente praticando da soli”, ha detto Pathak.
