
Robotika
A mérnökök eszközt fejlesztenek bármely autonóm robotrendszer fejlesztésére
Az MIT mérnökeiből álló csapat optimalizáló kódot fejlesztett ki bármely autonóm robotrendszer javítására. A kód automatikusan azonosítja, hogyan és hol kell módosítani a rendszert a robot teljesítményének javítása érdekében.
A mérnökök megállapítások a Robotics: Science and Systems éves New York-i konferencián mutatják be. A csapat tagja volt Charles Dawson, az MIT végzős hallgatója és ChuChu Fan, a MIT Repülési és Űrhajózási Tanszékének adjunktusa.
AI és robotrendszerek tervezése
A mesterséges intelligenciát (AI) és a robotrendszereket számos iparágban használják, és mindegyik rendszer az adott rendszerre jellemző tervezési folyamat eredménye. Egy autonóm robot megtervezéséhez a mérnökök próba-hiba szimulációkra támaszkodnak, amelyek gyakran intuíción alapulnak. Ugyanakkor a szimulációkat a robot konkrét alkatrészeihez és a kijelölt feladataihoz szabják, vagyis nincs igazi „recept”, amely biztosítaná a sikeres eredményt.
Az MIT mérnökei ezen változtatnak a robotikusok számára készült új általános tervezőeszközükkel. Kifejlesztettek egy optimalizáló kódot, amely szinte bármilyen autonóm robotrendszer szimulációjához alkalmazható, és segít automatikusan azonosítani, hogy milyen módokon javítható a robot teljesítménye.
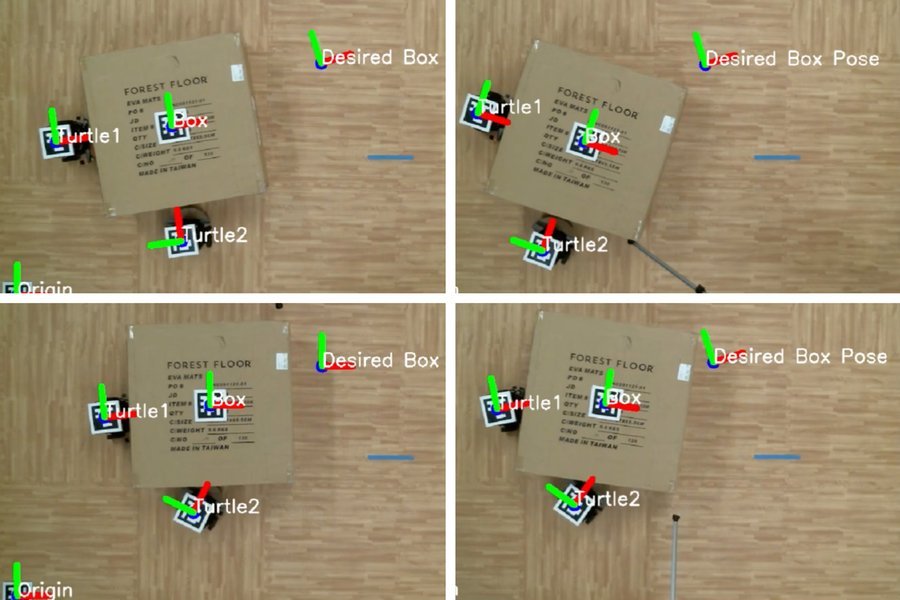
Az eszköz bizonyította, hogy képes javítani két nagyon eltérő autonóm rendszer teljesítményét. Az első egy robot volt, amely két akadály közötti ösvényen navigált, a másik pedig egy robotpár volt, amelyek együtt mozgattak egy nehéz dobozt.
A kutatók szerint ez az új általános célú optimalizáló segíthet felgyorsítani az autonóm rendszerek széles skálájának, például a sétálórobotoknak vagy az önvezető járműveknek a fejlesztését.
Dawson és Fan azt mondta, hogy felismerték az ilyen típusú eszközök szükségességét, miután megfigyelték a más mérnöki tudományágak számára elérhető különféle automatizált tervezési eszközöket.
„Ha egy gépészmérnök szélturbinát akarna tervezni, egy 3D CAD eszközt használhatna a szerkezet megtervezéséhez, majd egy végeselemes elemző eszközzel ellenőrizheti, hogy ellenáll-e bizonyos terheléseknek” – mondja Dawson. "Azonban hiányoznak ezek a számítógéppel segített tervezési eszközök az autonóm rendszerek számára."
Az autonóm rendszer optimalizálása érdekében a robotikus általában először kidolgozza a rendszer és az egymással kölcsönhatásban lévő alrendszereinek szimulációját, mielőtt az egyes összetevők bizonyos paramétereit figyelembe veszi. A szimulációt ezután előre futtatjuk, hogy megnézzük, hogyan fog működni a rendszer.
Az összetevők optimális kombinációjának meghatározása előtt több próba és hiba eljárást kell végrehajtani, és ez időigényes erőfeszítés.
„Ahelyett, hogy azt mondaná: 'Adott a terv, mi a teljesítmény?' ezt meg akartuk fordítani, hogy azt mondjuk: „Tekintettel arra a teljesítményre, amit látni akarunk, mi az a design, ami elvezet minket?” – mondja Dawson.
Az optimalizálási keretrendszert vagy számítógépes kódot úgy tervezték, hogy automatikusan megtalálja a meglévő rendszeren elvégezhető módosításokat. A kód az automatikus differenciáláson alapul, amely egy programozási eszköz, amelyet eredetileg neurális hálózatok betanítására használnak. Ez a „autodiff”-nek is nevezett technika segít gyorsan és hatékonyan „kiértékelni a deriváltot”, vagy bármely paraméter változására való érzékenységet.
„Módszerünk automatikusan megmondja, hogyan tehetünk kis lépéseket a kezdeti tervezéstől a céljainkat elérő tervezés felé” – mondja Dawson. „Az autodiff segítségével lényegében beleássuk a szimulátort meghatározó kódba, és kitaláljuk, hogyan kell ezt az inverziót automatikusan végrehajtani.”

Az eszköz tesztelése
Az eszközt két különálló autonóm robotrendszeren tesztelték, és javította az egyes rendszerek teljesítményét a laboratóriumi kísérletekben. Míg az első rendszer egy kerekes robotot tartalmazott, amelyet két akadály közötti útvonal tervezésére terveztek, a második rendszer volt az, amely igazán lenyűgöző volt.
A második rendszer bonyolultabb volt: két kerekes robot együtt dolgozott, hogy egy dobozt a célpozíció felé toljon, ami azt jelenti, hogy a szimuláció sokkal több paramétert tartalmazott. Az eszköz képes volt hatékonyan azonosítani azokat a lépéseket, amelyek szükségesek ahhoz, hogy a robotok elvégezhessék feladatukat, és az optimalizálási folyamat 20-szor gyorsabb volt, mint a hagyományos technikák.
„Ha a rendszernek több optimalizálandó paramétere van, eszközünk még jobban teljesíthet, és exponenciálisan több időt takaríthat meg” – mondja Fan. "Ez alapvetően egy kombinatorikus választás: a paraméterek számának növekedésével a választási lehetőségek is növekednek, és a mi megközelítésünk ezt egy csapásra csökkentheti."
Az általános optimalizáló letölthető, és a csapat most azon dolgozik, hogy tovább finomítsa, ami összetettebb rendszerek esetén is hasznos lesz.
„Célunk, hogy az embereket jobb robotok építésére kényszerítsük” – mondja Dawson. „Új építőelemet biztosítunk a rendszerük optimalizálásához, így nem kell a nulláról kezdeniük.”















