
Robotika
Az új 3D-nyomtatott anyagok érzékelik saját mozgásukat
Az MIT kutatócsoportja új módszert fejlesztett ki hangolható mechanikai tulajdonságokkal rendelkező 3D-nyomtatási anyagokhoz, amelyek segítségével érzékelhetik saját mozgásukat és a környezettel való interakcióikat. A csapat egyetlen anyagból és egy 3D-s nyomtatóval való próbálkozással készítette el az érzékelő szerkezeteket.
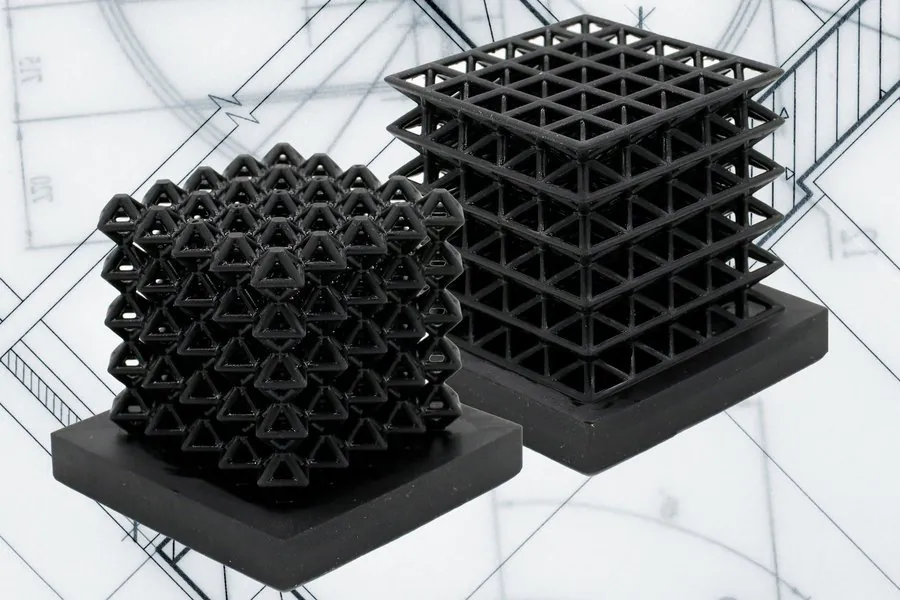
Először 3D-nyomtatott rácsos anyagokat vettek fel, és levegővel töltött csatornák hálózatát építették be a szerkezetbe a nyomtatási folyamat során. Ezután betekintést nyerhetnek az anyag mozgásába, ha megmérik a nyomásváltozásokat ezekben a csatornákban, amikor a szerkezetet összenyomják, hajlítják vagy nyújtják.
A rácsos anyagok ismétlődő mintázatú egyedi cellákból állnak, és a cellák méretének vagy alakjának megváltoztatásával az anyag mechanikai tulajdonságai megváltoznak.
Az új technika végül segíthet olyan rugalmas puha robotok létrehozásában, amelyek beágyazott érzékelőkkel rendelkeznek, amelyek lehetővé teszik a robotok számára, hogy megértsék testtartásukat és mozgásukat. Ez testreszabható, hordható okoseszközök kifejlesztéséhez is vezethet.
Lillian Chin társszerző és végzős hallgató az MIT Számítástechnikai és Mesterséges Intelligencia Laboratóriumában (CSAIL).
„Ennek a munkának az az ötlete, hogy bármilyen 3D-nyomtatható anyagot elvihetünk, és egyszerűen átvezethetjük rajta a csatornákat, hogy szerkezettel szenzorációt kapjunk. És ha igazán összetett anyagokat használsz, akkor a mozgás, az érzékelés és a struktúra egyben lehet” – mondta Chin.
A cikkben szerepel Ryan Truby társszerző is, aki a CSAIL korábbi posztdoktora és jelenlegi adjunktusa a Northwestern Egyetemen; Annan Zhang, a CSAIL végzős hallgatója; és vezető szerző Daniela Rus, Viterbi Andrew és Erna elektromérnöki és számítástechnikai professzor és a CSAIL igazgatója.
A kutatást a Tudomány előlegek.
3D nyomtatási technika
A csapat a 3D nyomtatásra támaszkodott, hogy levegővel töltött csatornákat közvetlenül a rácsot alkotó támaszokba építsen be. Amikor a szerkezet elmozdul vagy összenyomódik, a csatornák deformálódnak, és megváltozik a belső levegő térfogata. Ez az eljárás lehetővé teszi a kutatók számára, hogy megmérjék a megfelelő nyomásváltozást egy készen kapható nyomásérzékelővel, amely visszajelzést ad az anyag deformációjáról.
„Ha kinyújtasz egy gumiszalagot, egy kis időbe telik, amíg visszaáll a helyére. De mivel levegőt használunk, és az alakváltozások viszonylag stabilak, nem kapjuk meg ugyanazokat az időben változó tulajdonságokat. Az érzékelőnkből származó információ sokkal tisztább” – mondja Chin.
A csapat digitális fényfeldolgozó 3D nyomtatással épített be csatornákat a szerkezetbe. Az eljárás során a szerkezetet kihúzzák egy gyantamedencéből, és kivetített fény segítségével pontos formára keményítik. Ezután egy képet vetítenek a nedves gyantára, és a fény által érintett területek kikeményednek.
A folyamat előrehaladtával a ragadós gyanta lecsöpög, és megakad a csatornákban, ami azt jelentette, hogy a csapatnak el kellett távolítania a felesleges gyantát, mielőtt megkeményedne. Ezt sűrített levegő, vákuum és bonyolult tisztítás keverékével tették.
„További ötletelést kell végeznünk a tervezési oldalról, hogy átgondolhassuk ezt a tisztítási folyamatot, mivel ez a fő kihívás” – folytatja Chin.
A csapat ezzel az eljárással több rácsszerkezetet hoz létre, és bemutatta, hogyan tudnak a levegővel töltött csatornák egyértelmű visszacsatolást generálni, amikor a szerkezeteket összenyomják vagy meghajlítják.
HSA Soft Robots
A kutatók csoportja érzékelőket is beépített a kézi nyíró auxetikumokba (HSA), amelyek a motorizált lágy robotokhoz kifejlesztett anyagok új osztálya. A HSA-k egyszerre nyújthatók és csavarhatók, így hatékony lágy robot-aktorként működhetnek. A HSA-kat azonban bonyolult formáik miatt nehéz „érzékelni”.
A csapat 3D-ben nyomtatott egy ilyen HSA puha robotot, amely különféle mozdulatokat, például hajlítást és csavarást tudott végrehajtani. Ezt követően több mint 18 órán át tartó mozgássorozaton ment keresztül, és az érzékelő adatait egy olyan neurális hálózat betanítására használták fel, amely pontosan megjósolta a robot mozgását.
„Az anyagtudósok keményen dolgoznak azon, hogy optimalizálják az épített anyagokat a funkcionalitás érdekében. Ez egy egyszerű, de nagyon hatásos ötletnek tűnik, hogy összekapcsolja azt, amit ezek a kutatók csinálnak az észlelés ezen birodalmával. Amint hozzáadjuk az érzékelést, a hozzám hasonló robotikusok jöhetnek, és aktív anyagként használhatják, nem csak passzív anyagként” – mondja Chin.
„A puha robotok folyamatos bőrszerű érzékelőkkel történő szenzorálása nyitott kihívás volt a területen. Ez az új módszer pontos proprioceptív képességeket biztosít a puha robotok számára, és megnyitja az ajtót a világ érintés útján történő felfedezéséhez” – folytatja Rus.
Chin és a csapat szerint az ilyen technológia jövője olyan dolgokhoz vezethet, mint például egy adott játékos fejére szabott futballsisakok. Ezek a sisakok érzékelési képességekkel rendelkeznek a belső szerkezeten belül, növelve a helyszíni ütközések visszajelzésének pontosságát.















