रोबोटिक्स
मानवों को देखकर रोबोट सीखने की विधि को सक्षम बनाती है
कार्नेगी मेलन विश्वविद्यालय (सीएमयू) के शोधकर्ताओं द्वारा विकसित एक नई सीखने की विधि रोबोटों को मानव-इंटरएक्शन वीडियो से सीधे सीखने और नई कार्यों के लिए जानकारी को सामान्य बनाने में सक्षम बनाती है, जो उन्हें घरेलू कार्यों को करना सिखाती है। सीखने की विधि को व्हर्ल कहा जाता है, जो इन-द-वाइल्ड ह्यूमन इमिटेटिंग रोबोट लर्निंग के लिए खड़ा है, और यह रोबोट को कार्यों को देखने और वीडियो डेटा इकट्ठा करने में मदद करता है ताकि वह अंततः काम पूरा करना सीख सके।
शोध को न्यूयॉर्क में रोबोटिक्स: साइंस एंड सिस्टम्स सम्मेलन में प्रस्तुत किया गया था।
सीखने का एक तरीका के रूप में अनुकरण
शिखर बहल कार्नेगी मेलन विश्वविद्यालय के स्कूल ऑफ कंप्यूटर साइंस में रोबोटिक्स इंस्टीट्यूट (आरआई) में एक पीएचडी छात्र हैं।
“अनुकरण सीखने का एक शानदार तरीका है,” बहल ने कहा। “मानवों को सीधे देखकर रोबोटों को वास्तव में सीखने में सक्षम करना क्षेत्र में एक हल नहीं हुआ समस्या है, लेकिन यह काम उस क्षमता को सक्षम करने में एक महत्वपूर्ण कदम है।”
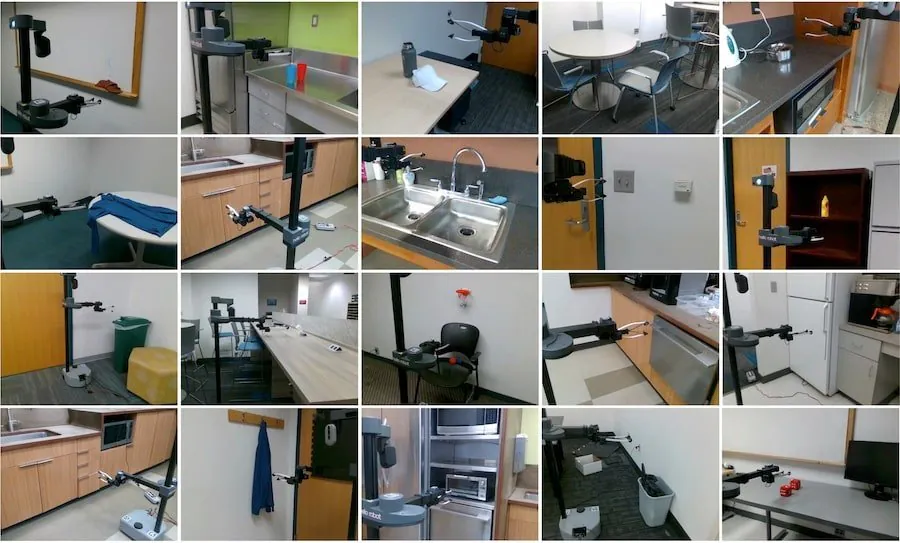
बहल ने दीपक पाठक और अभिनव गुप्ता के साथ काम किया, जो दोनों आरआई में संकाय सदस्य भी हैं। टीम ने एक ऑफ-द-शेल्फ रोबोट में एक कैमरा और अपने सॉफ्टवेयर जोड़ा, जिसने 20 से अधिक कार्यों को पूरा करना सीखा। इन कार्यों में घरेलू उपकरणों को खोलने और बंद करने से लेकर कूड़ेदान से कूड़ा निकालने तक सब कुछ शामिल था। प्रत्येक बार रोबोट ने कार्य पूरा करने से पहले मानव द्वारा कार्य पूरा करने को देखा।
पाठक आरआई में एक सहायक प्रोफेसर हैं।
“यह काम घर में रोबोट लाने का एक तरीका प्रस्तुत करता है,” पाठक ने कहा। “रोबोटों को सफलतापूर्वक विभिन्न कार्यों को पूरा करने के लिए प्रोग्राम या प्रशिक्षित करने की प्रतीक्षा करने के बजाय, यह प्रौद्योगिकी हमें रोबोटों को तैनात करने और उन्हें कार्यों को पूरा करने के लिए सीखने की अनुमति देती है, जबकि वे अपने पर्यावरण के अनुकूल होते हैं और केवल देखकर सुधारते हैं।”
https://www.youtube.com/watch?v=pIbHOuvuCl8
व्हर्ल बनाम वर्तमान विधियां
रोबोट को एक कार्य सिखाने के लिए अधिकांश वर्तमान विधियां अनुकरण या प्रबलीकरण सीखने पर निर्भर करती हैं। अनुकरण सीखने के साथ, मानव रोबोट को मैन्युअल रूप से संचालित करते हैं और इसे एक कार्य पूरा करना सिखाते हैं, जिसके लिए कई बार इसे करने की आवश्यकता होती है इससे पहले कि रोबोट सीखे। प्रबलीकरण सीखने के साथ, रोबोट आमतौर पर वास्तविक दुनिया में अनुकूलन के लिए प्रशिक्षण को लागू करने से पहले लाखों उदाहरणों पर प्रशिक्षित किया जाता है।
इन दोनों मॉडलों में एक संरचित वातावरण में एक单 कार्य सिखाने में कुशल होने के बावजूद, वे मापन और तैनाती में कठिन साबित होते हैं। लेकिन व्हर्ल के साथ, एक रोबोट किसी भी वीडियो से सीख सकता है जिसमें मानव एक कार्य पूरा करता है। यह आसानी से स्केलेबल है, किसी एक विशिष्ट कार्य तक सीमित नहीं है, और घरेलू वातावरण में काम कर सकता है।
व्हर्ल रोबोटों को उनके प्राकृतिक वातावरण में कार्यों को पूरा करने में सक्षम बनाता है। और जबकि पहले कुछ प्रयासों में अक्सर विफलता होती थी, यह केवल कुछ सफलताओं के बाद बहुत तेजी से सीख सकता था। रोबोट हमेशा मानव की तरह ही कार्य पूरा नहीं करता है, लेकिन इसका कारण यह है कि इसके विभिन्न भाग हैं जो अलग तरह से चलते हैं। कहा जा रहा है, कार्यों को पूरा करने का परिणाम हमेशा एक ही होता है।
“रोबोटिक्स को जंगल में मापने के लिए, डेटा विश्वसनीय और स्थिर होना चाहिए, और रोबोटों को अपने पर्यावरण में अभ्यास करके बेहतर होना चाहिए,” पाठक ने कहा।
