Robot
Robot đi nhanh hơn với chân linh hoạt mới được phát triển
Các nhà robotic tại Đại học California San Diego đã phát triển chân linh hoạt cho robot. Công nghệ mới này có thể giúp robot đi nhanh hơn 40 phần trăm trên các địa hình không đều như sỏi và mảnh gỗ.
Sự phát triển mới này rất quan trọng cho nhiều ứng dụng khác nhau, đặc biệt là các nhiệm vụ tìm kiếm và cứu hộ.
Nghiên cứu sẽ được trình bày tại hội nghị RoboSoft, sẽ diễn ra trực tuyến và statt giữa ngày 15 tháng 5 và 15 tháng 7 năm 2020.
Emily Lathrop là sinh viên tiến sĩ tại Trường Kỹ thuật Jacobs của UC San Diego và là tác giả đầu tiên của bài báo.
“Robot cần phải đi nhanh và hiệu quả trên địa hình tự nhiên, không đều để chúng có thể đi đến mọi nơi con người có thể đi, nhưng có thể không nên,” Lathrop nói.
Michael T. Tolley là giáo sư tại Bộ môn Kỹ thuật Cơ khí và Hàng không tại UC San Diego. Ông là tác giả cao cấp của bài báo.
“Thông thường, robot chỉ có thể kiểm soát chuyển động tại các khớp cụ thể,” Tolley nói. “Trong công việc này, chúng tôi đã chứng minh rằng một robot có thể kiểm soát độ cứng, và do đó hình dạng, của chân nó vượt trội so với thiết kế truyền thống và có thể thích nghi với nhiều loại địa hình khác nhau.”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
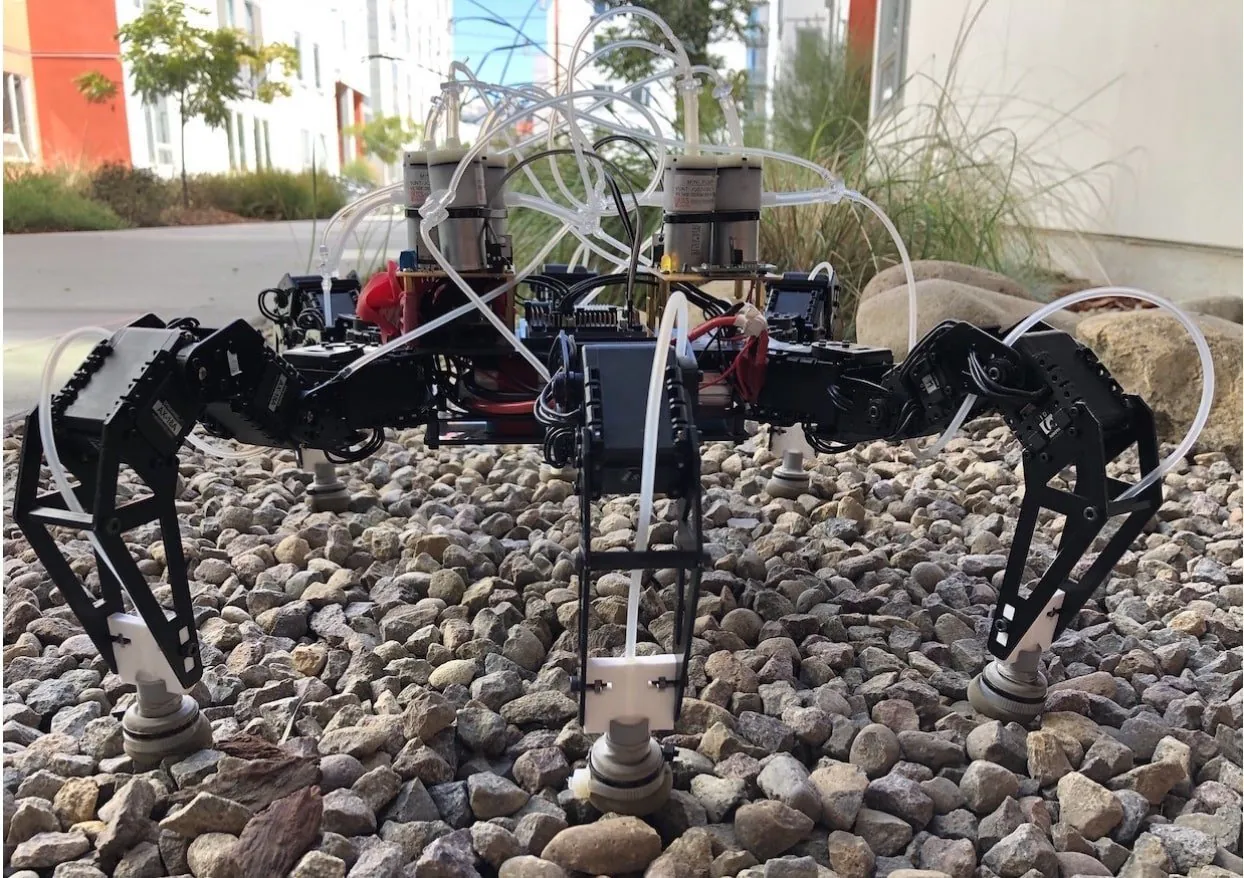
Chân Robot Linh hoạt
Chân robot linh hoạt bao gồm một màng latex được lấp đầy bằng bột cà phê. Bột cà phê có thể chuyển đổi giữa trạng thái rắn và lỏng. Cơ chế cho phép truyền thông granular, như bột cà phê, hoạt động theo cách này được gọi là granular jamming. Kết quả là, robot có thể đi nhanh hơn và có độ bám tốt hơn.
Khi chân robot chạm đất, chúng trở nên cứng và phù hợp với bề mặt để thiết lập nền tảng vững chắc. Khi chúng di chuyển, chân trở nên lỏng lẻo và nới lỏng giữa các bước, và cấu trúc hỗ trợ được sử dụng để giúp chúng giữ linh hoạt trong khi bị kẹt.
Những chân linh hoạt này là loại đầu tiên được thử nghiệm trên bề mặt không đều.

Các nhà nghiên cứu đã lắp đặt chân trên một robot hexapod và thiết kế, xây dựng một hệ thống trên tàu. Hệ thống trên tàu có khả năng tạo ra áp suất âm và áp suất dương để nới lỏng và kẹt chân giữa mỗi bước. Để kẹt chân, một máy bơm chân không loại bỏ không khí giữa bột cà phê. Chúng cũng có thể bị kẹt một cách thụ động nếu trọng lượng của robot buộc không khí ra khỏi giữa bột cà phê.
Bề mặt không đều
Robot đã được thử nghiệm đi trên nhiều bề mặt khác nhau, bao gồm mặt đất bằng phẳng, mảnh gỗ và sỏi, với và không có chân linh hoạt. Kết quả cho thấy kẹt thụ động hiệu quả nhất trên mặt đất bằng phẳng và kẹt chủ động tốt nhất trên đá lỏng.
Với chân linh hoạt, chân của robot có thể bám vào mặt đất tốt hơn, điều này làm tăng tốc độ của nó. Điều này đặc biệt đúng khi robot đi lên dốc và địa hình không đều.
Nick Gravish là giáo sư tại Bộ môn Kỹ thuật Cơ khí và Hàng không của UC San Diego và là đồng tác giả của nghiên cứu.
“Thế giới tự nhiên đầy rẫy những địa hình khó khăn cho robot đi – trượt, đá và chất nền mềm đều làm cho việc đi trở nên phức tạp,” Gravish nói. “Chân có thể thích nghi với các loại địa hình khác nhau có thể giúp robot cải thiện khả năng di chuyển.”
Các nhà nghiên cứu sẽ cố gắng tích hợp các cảm biến mềm vào đáy chân, cho phép sử dụng một bảng điều khiển điện tử. Bảng điều khiển điện tử sẽ xác định loại địa hình mà robot sẽ đi qua và liệu chân có cần được kẹt chủ động hay thụ động. Các nhà nghiên cứu cũng sẽ tiếp tục cải tiến thiết kế và thuật toán điều khiển để đạt được hiệu quả tốt hơn.












