로보틱스
로봇이 인간을 관찰하여 학습하는 방법이 가능해짐
카네기 멜런 대학(Carnegie Mellon University, CMU)의 연구자들이 개발한 새로운 학습 방법으로 로봇이 인간의 상호작용 비디오를 직접 학습하고 새로운 작업에 대한 정보를 일반화하여 가사 작업을 수행하는 방법을 학습할 수 있게 되었다. 이 학습 방법은 WHIRL이라고 불리며, In-the-wild Human Imitating Robot Learning의 약자로서, 로봇이 작업을 관찰하고 비디오 데이터를 수집하여 궁극적으로 작업을 완수하는 방법을 학습하도록 도와준다.
이 연구는 뉴욕에서 열린 Robotics: Science and Systems 컨퍼런스에서 발표되었다.
모방을 통해 학습하는 방법
식하르 바흐尔(Shikhar Bahl)은 카네기 멜런 대학의 로봇공학 연구소(Robotics Institute, RI)에서 박사 과정 학생이다.
“모방은 학습하는 좋은 방법입니다,” 바흐르는 말했다. “로봇이 직접 인간을 관찰하여 학습하는 것은 여전히 분야에서 해결되지 않은 문제이지만, 이 연구는 그 능력을 가능하게 하는 중요한 단계를 내딛었습니다.”
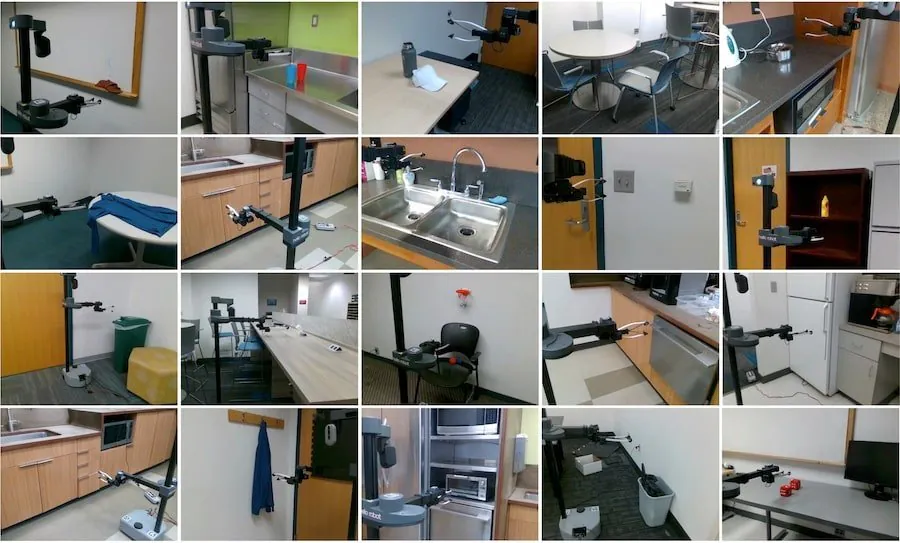
바흐르는 딥اک 파타크(Deepak Pathak)와 아브히나브 구프타(Abhinav Gupta)와 함께 작업했으며, 두 사람은 모두 RI의 교수이다. 연구 팀은 소프트웨어와 카메라를 장착한 로봇을 사용하여 20개 이상의 작업을 수행하도록 학습시켰다. 이러한 작업에는 가전제품을 열고 닫는 것부터 쓰레기봉지를 비우는 것까지 모든 것이 포함되었다. 로봇은 각 작업을 수행하기 전에 인간이 작업을 수행하는 것을 관찰했다.
파타크는 RI의 조교수이다.
“이 연구는 로봇을 집안으로 가져오는 방법을 제시합니다,” 파타크는 말했다. “로봇을 성공적으로 작업을 수행하도록 프로그래밍하거나 훈련하기 위해 기다리는 대신, 이 기술을 사용하면 로봇을 집안에 배치하고 작업을 수행하는 방법을 학습하도록 할 수 있으며, 로봇은 환경에 적응하고 단지 관찰함으로써 개선됩니다.”
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL과 현재 방법의 비교
로봇에 작업을 가르치는 현재 방법은 대부분 모방 학습이나 강화 학습에 의존한다. 모방 학습의 경우, 인간이 로봇을 수동으로操作하여 작업을 완수하는 방법을 가르치며, 이는 로봇이 작업을 학습하기 위해 여러 번 반복되어야 한다. 강화 학습의 경우, 로봇은 일반적으로 시뮬레이션에서 수백만 개의 예제를 통해 훈련된 후 실제 세계에 적용된다.
이 두 가지 모델은 구조화된 환경에서 로봇이 단일 작업을 수행하도록 효율적으로 가르치는 데 효과적이지만, 확장 및 배치에는 어려움이 있다. 그러나 WHIRL을 사용하면 로봇이 인간이 작업을 수행하는 비디오에서 학습할 수 있으며, 이는 쉽게 확장할 수 있고, 특정 작업에 국한되지 않으며, 가정 환경에서 작동할 수 있다.
WHIRL은 로봇이 자연스러운 환경에서 작업을 수행하도록 ermöglicht. 처음 몇 번의 시도는 일반적으로 실패로 끝나지만, 몇 번의 성공 후에 매우 빠르게 학습할 수 있다. 로봇은 항상 인간과 동일한 동작으로 작업을 수행하지는 않지만, 그것은 로봇이 다른 부품을 가지고 있으며, 다르게 움직이기 때문이다. 그러나 작업을 수행하는 최종 결과는 항상 동일하다.
“로봇을 야외에서 확장하기 위해서는 데이터가 신뢰할 수 있고 안정적이어야 하며, 로봇은 자신의 환경에서 연습함으로써 더 좋아져야 한다,” 파타크는 말했다.
