Robotique
Un cafard avec un équipement de recherche et de sauvetage doté de l’IA
Des chercheurs internationaux en robotique ont développé un système de recherche et de sauvetage urbain (USAR) qui utilise un cafard « dirigeable » pour transporter un système de détection de survivants à l’infrarouge miniaturisé et doté de l’apprentissage automatique à travers des scénarios de catastrophe autrement impraticables.
Le système est une collaboration entre les départements de recherche de Singapour, de Chine, d’Allemagne et du Royaume-Uni. Il utilise le cafard de Madagascar comme véhicule et dispose d’une autonomie de plusieurs heures.

Source: https://arxiv.org/abs/2105.10869
Le système hybride de sauvetage comporte un modèle d’apprentissage automatique pour la détection humaine qui a été formé sur des images infrarouges (IR) et alimente le système de détection mobile IR, qui peut fonctionner de manière autonome si nécessaire, en signalant les survivants retrouvés à une station de base opérationnelle.
Ressources locales limitées
Le cadre d’apprentissage automatique nécessite de fonctionner avec des ressources extrêmement limitées : seuls 191,8 ko de RAM statique et 1988 ko de mémoire Flash sont disponibles pour le système à partir des exigences de puissance générales de l’appareil, qui doivent également fournir le stimulus électrique pour l’insecte.

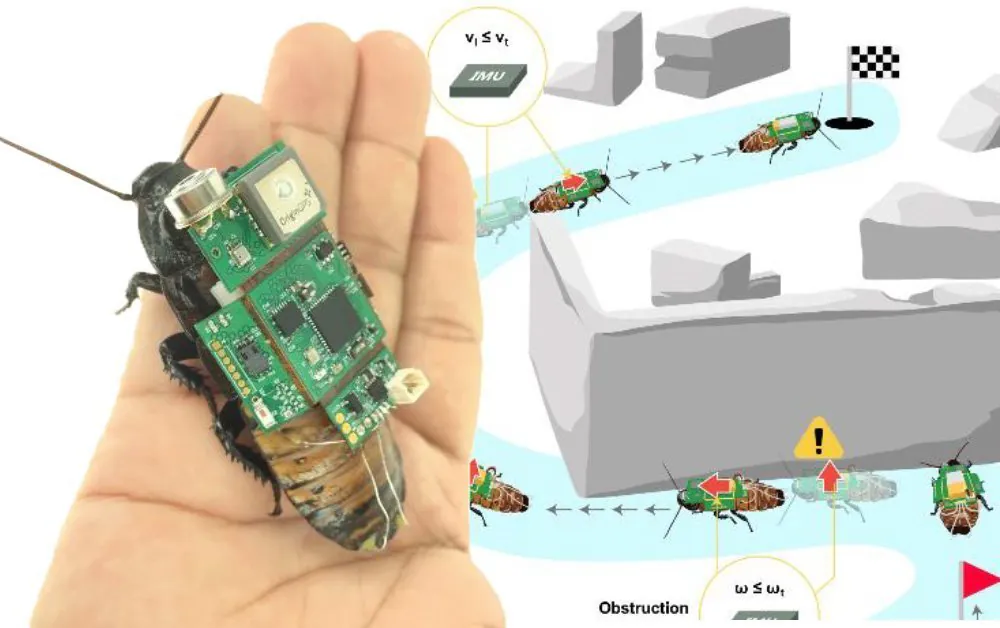
Les trois blocs fonctionnels du sac à dos du cafard, représentés ci-dessus, comprennent la stimulation sans fil, une unité de contrôle principale et des composants périphériques, avec le système d’apprentissage automatique dérivé de l’IR et la fonctionnalité de navigation intégrée dans l’unité de contrôle principale. Le circuit de la monture a été divisé en plusieurs composants afin de mieux s’adapter à la géométrie du cafard.
Le cafard de Madagascar (parmi les plus grandes espèces du monde, avec une capacité de charge maximale de 15 g) est contrôlé par de petites décharges électriques qui le dirigent dans une direction ou une autre, mises en œuvre par quatre électrodes implantées dans les antennes (cerci) de la créature et dans son abdomen. Les électrodes sont fixées avec de la cire d’abeille.
Ajout de l’IA à la recherche et au sauvetage d’insectes
La nouvelle initiative développe les travaux précédents de l’UC Berkeley et de l’Université technologique de Nanyang de Singapour, qui ont conçu pour la première fois l’utilisation de scarabées dirigeables dans les scénarios de recherche et de sauvetage.

2016 recherche sur le contrôle du trajet de vol d’un scarabée. Source: https://www.youtube.com/watch?v=iljHXpE4LG8
Bien que les scarabées aient la capacité de voler, leur capacité de charge est réduite, ce qui diminue les capacités potentielles des technologies embarquées, et les exigences de consommation d’énergie sont critiques, en particulier dans les cas où il est nécessaire de faire fonctionner un algorithme d’apprentissage automatique.
Le système autonome de reconnaissance humaine embarqué dans la nouvelle initiative utilise un modèle de classification d’images utilisant support vector machine (SVM) et Histogram of Oriented Gradients.
Le mouvement du cafard est dirigé par le système de navigation intégré, et guide le « biobot » vers une destination prédéterminée sans aucune connaissance des obstacles intermédiaires. Pour la plupart, les compétences de navigation formidables du cafard résolvent la plupart des problèmes pour atteindre un emplacement autrement inaccessible.

Source: https://arxiv.org/abs/2105.10869
Le système infrarouge embarqué capte des images à 1 Hz, fonctionnant avec succès dans les zones sombres, et signale sans fil les survivants localisés à un centre de commandement en temps réel. Pour conserver l’énergie, le système d’analyse d’images ne fonctionne que si déclenché par une lecture infrarouge positive.
Le modèle occupe un espace de 18,3 ko de mémoire Flash et 52,2 ko de RAM statique, réalisant un temps de calcul de 95 millisecondes. Un temps de traitement raisonnable est essentiel dans un scénario de recherche et de sauvetage, car les signatures infrarouges distantes pourraient sinon être manquées dans l’intervalle de traitement pendant que le cafard change de direction et traverse le terrain.
Le système comporte également des capteurs pour surveiller la température, l’humidité et le CO2, afin de signaler les conditions locales pour une tentative de sauvetage possible, et de permettre au centre de contrôle de diriger la créature loin de toute situation qui la mettrait en danger.
Test dans des terrains simulés
Le système a été testé dans un scénario de catastrophe simulé (image ci-dessus), avec une négociation d’obstacles efficace, à l’exception de certaines configurations particulièrement difficiles impliquant des pentes abruptes, car le cafard est désavantagé en termes de poids en raison de l’équipement attaché.

L’architecture de navigation avait initialement tendance à se bloquer face à des obstacles écrasants, tels que des situations où même le cafard ne pouvait pas aller plus loin, et les chercheurs ont ensuite développé un système de navigation à rétroaction prédictive pour améliorer les performances face à des obstacles importants. Le système a pu atteindre un taux de réussite de 100 % dans les environnements avec aucun ou peu d’obstacles, et un taux de réussite plus élevé avec des obstacles importants.
Lorsque l’échec s’est produit, les chercheurs concluent que cela pourrait être remédié en augmentant la durée de l’expérience, bien que cela ait logiquement des implications dans un scénario de recherche et de sauvetage critique en termes de temps.
Vue infrarouge
La caméra infrarouge embarqué a des spécifications modestes, fonctionnant à 32×32 pixels avec un champ de vision de 90 degrés. Les images, lorsqu’elles sont déclenchées, sont passées à travers un filtre de débruitage médian.
Le système atteint un taux de réussite de 87 % pour distinguer les sujets humains d’autres types de signatures thermiques, atteignant 90 % lorsqu’il se trouve dans un rayon de proximité de 0,5 m et 1,5 m.
En raison des contraintes d’énergie et de taille de puce, l’étude initiale ne comporte pas de système de localisation embarqué, et il n’est donc pas possible de suivre la position du cafard en temps réel. Les chercheurs suggèrent que la détermination de la position morte pourrait être mise en œuvre comme une solution pour économiser l’énergie, avec des signaux de localisation à basse énergie relayés au centre de contrôle, dans les mises en œuvre futures.
Insectes en tant qu’opérateurs de recherche et de sauvetage
Les dix dernières années ont vu une série de projets de recherche visant à utiliser la résilience et la puissance de navigation des insectes pour créer des systèmes hybrides ou purement robotiques pour les scénarios de recherche et de sauvetage. Outre les travaux de 2016 liés aux scarabées qui précèdent cette dernière initiative, il y a eu de nombreuses tentatives pour recréer les capacités d’insectes sous forme purement robotique.
Cela inclut un projet de recherche de 2019 de l’UoC qui a proposé un robot ergonomiquement simple basé sur les principes d’un cafard, l’un des premiers projets de ce type à aborder la fragilité extrême des insectes robotiques.












