Robotiikka
Tekoäly auttaa mikrorobottien oppimisessa uimisessa ja navigoinnissa
Santa Claran yliopiston, New Jersey Institute of Technologyn ja Hong Kongin yliopiston tutkijaryhmä on onnistuneesti käyttänyt syvää vahvistusoppimista opettaakseen mikroroboteille uimista. Uusi kehitys on merkittävä askel eteenpäin mikrouimisen kyvyssä.
Asiantuntijat ovat jatkuvasti keskittyneet luomaan keinotekoisia mikrouimareita, jotka voivat navigoida samalla tavalla kuin luonnostaan esiintyvät uimareita, kuten bakteereja. Nämä mikrouimareita voidaan käyttää tulevaisuudessa moniin biolääketieteellisiin sovelluksiin, kuten kohdennettuun lääkehoitoon ja mikrokirurgiaan. Vaikka kehitykseen on kiinnitetty huomiota, useimmat nykyiset keinotekoiset mikrouimareita voivat suorittaa vain yksinkertaisia manööverejä kiinteillä liikuntatavoilla.
Uusi tutkimus on julkaistu Communications Physics-julkaisussa.
Mikrouimareiden opettaminen tekoälyllä
Tutkimuksessa tiimi päätteli, että tekoäly voisi opettaa mikrouimareita sopeutumaan muuttuviin olosuhteisiin. Mikrouimareiden, samoin kuin ihmisten, tarvitsee vahvistusoppimista ja palautetta oppiakseen uimaan, mutta niillä on ainutlaatuinen joukko haasteita.
On Shun Pak on apulaisprofessori mekaniikasta Santa Claran yliopistossa.
“Uiminen mikrotasolla itsessään on haastava tehtävä”, sanoi On Shun Pak. “Kun haluat, että mikrouimari suorittaa monimutkaisempia manööverejä, heidän liikuntatapojensa suunnittelu voi nopeasti tulla hallitsemattomaksi.”
Yhdistäminen ANNeja ja vahvistusoppimista
Tutkijaryhmä yhdisti keinotekoiset neurverkkverkot (ANN) ja vahvistusoppimisen opettaakseen yksinkertaisen mikrouimarin uimaan ja navigointiin mielivaltaiseen suuntaan. Mikrouimari saa palautetta tietystä toiminnasta, jonka se sitten käyttää edelleen oppiakseen uimaan kokemuksensa perusteella ympäristössä.
Alan Tsang on apulaisprofessori mekaniikasta Hong Kongin yliopistossa.
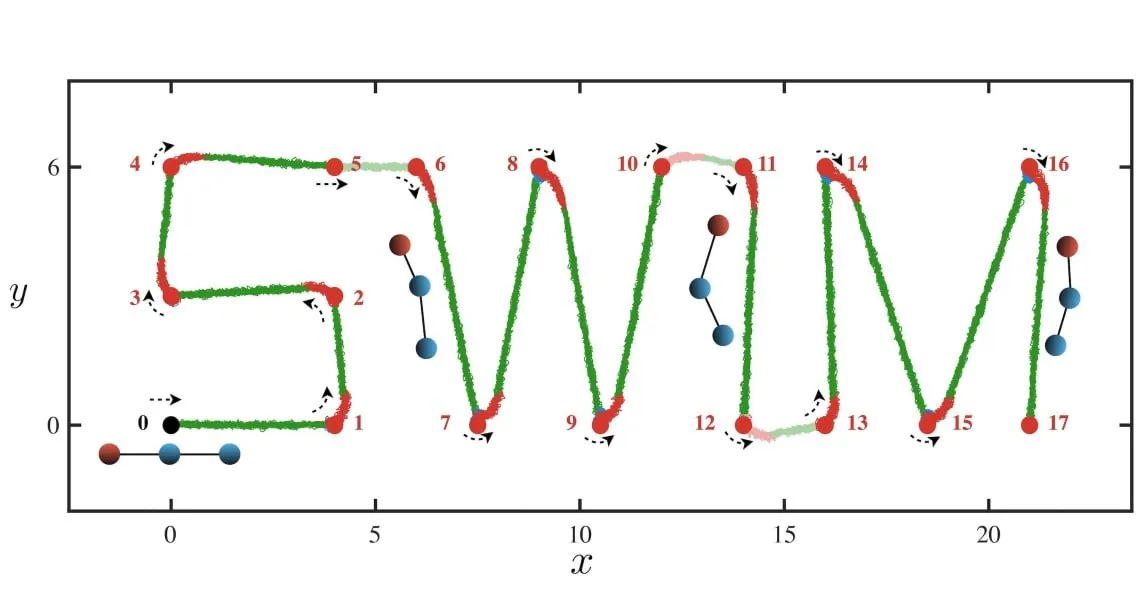
“Samoin kuin ihminen oppii uimaan, mikrouimari oppii liikuttamaan ‘ruumiinosiaan’ – tässä tapauksessa kolmea mikrohiukkasta ja venyttäviä linkkejä – itseohjautumaan ja kääntymään”, sanoi Tsang. “Se tekee niin ilman, että se riippuu ihmisen tietämyksestä, vaan ainoastaan koneoppimisalgoritmin perusteella.”
Tekoälykäyttöinen uimari voi vaihdella eri liikuntatavoilla sopeutuvasti, mikä mahdollistaa sen navigoinnin mihin tahansa kohdesijaintiin omin avuin.
Tutkijat osoittivat mikrouimarin voiman sallimalla sen seurata monimutkaista reittiä ilman, että se oli ohjelmoitu niihin.
Yuan-nan Young on professori matemaattisista tieteistä New Jersey Institute of Technologyn yliopistossa.
“Tämä on ensimmäinen askel haasteen ratkaisemisessa kehittää mikrouimareita, jotka voivat sopeutua biologisesti solujen tavoin navigoimaan monimutkaisissa ympäristöissä omin avuin”, sanoi Yuan-nan Young.
Sopeutuvat käyttäytymiset, kuten nämä, ovat lupaavia biolääketieteellisille sovelluksille.
Arnold Mathijssen on asiantuntija mikroroboteista ja biofysiikasta Pennsylvanian yliopistossa. Hän ei ollut mukana tutkimuksessa.
“Tämä työ on avain esimerkki siitä, miten tekoälyn nopea kehitys voidaan hyödyntää ratkaisemaan ratkaisemattomia haasteita liikkeen ongelmissa fluididynamiikassa”, sanoi Mathijssen. “Tämän työn yhdistäminen koneoppimisen ja mikrouimareiden kanssa aiheuttaa lisää yhteyksiä näiden kahden erittäin aktiivisen tutkimusalueen välille.”












