
Robotics
AI-toega otsingu- ja päästeseadmetega prussakas
Rahvusvahelised robootikauurijad on välja töötanud Urban Search and Rescue (USAR) süsteemi, mis kasutab "juhitavat" elavat prussakat miniatuurse masinõppega ellujäänute infrapunatuvastussüsteemi transportimiseks muidu navigeerimata katastroofistsenaariumide kaudu.
. süsteem on Singapuri, Hiina, Saksamaa ja Ühendkuningriigi uurimisosakondade koostöö. See kasutab Madagaskari prussakas sõidukina ja sellel on piisavalt võimsust mitmeks tunniks töötamiseks.
Allikas: https://arxiv.org/abs/2105.10869
Hübriidpäästesüsteemil on masinõppemudel inimeste tuvastamiseks, mis on koolitatud infrapunapiltide (IR) abil, ja toidab mobiilset IR-tuvastussüsteemi, mis võib vajadusel töötada autonoomselt, teatades leitud ellujäänutest tagasi tugijaama.
Piiratud kohalikud ressursid
Masinõppe raamistik on vajalik erakordselt õhukeste ressurssidega töötamiseks: seadme üldistest võimsusnõuetest jääb süsteemile vaid 191.8 kB staatilist muutmälu ja 1988 kB välkmälu, mis peavad andma putukale ka elektrilise stiimuli.

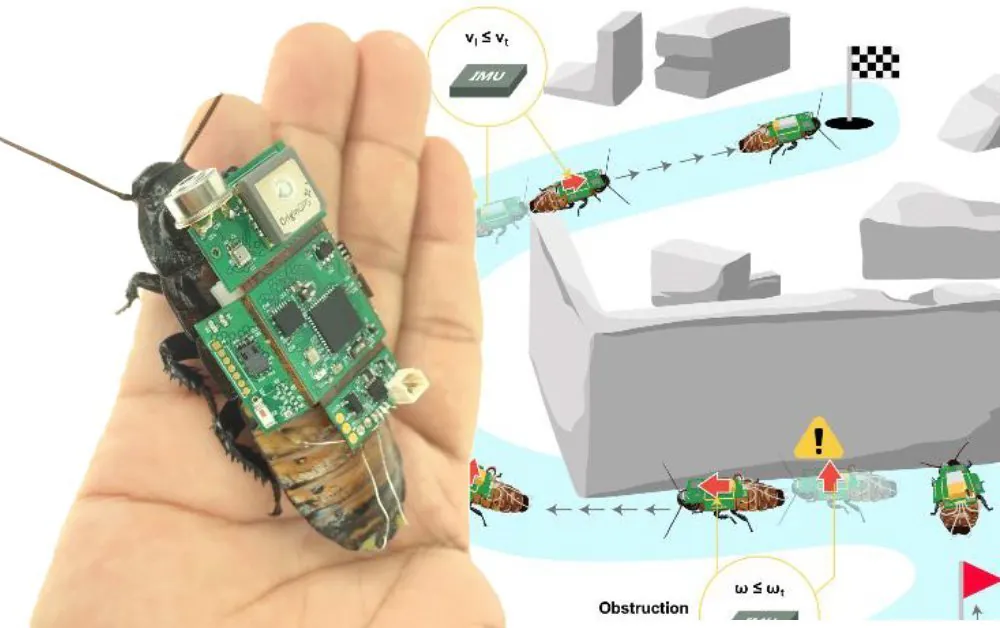
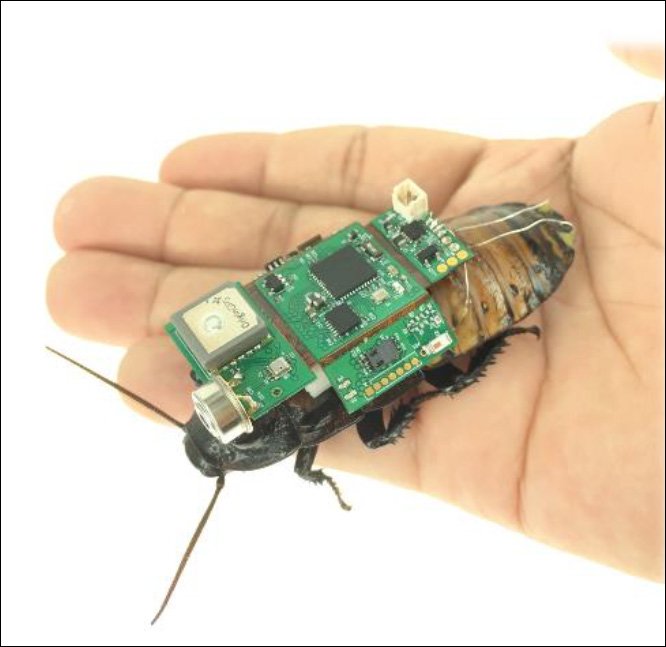
Prussaka seljakoti kolm funktsionaalset plokki, mis on ülaltoodud pildil, hõlmavad juhtmevaba stimulatsiooni, esmast kontrollerit ja väliskomponente koos IR-st tuletatud masinõppesüsteemi ja navigeerimisfunktsiooniga, mis on manustatud peamisse kontrolleriplokki. Seadme vooluahel on jagatud mitmeks komponendiks, et prussaka geomeetriat paremini sobitada.
Madagaskari prussakas (sealhulgas suurim liik maailmas, maksimaalse kandevõimega 15 g) juhitakse väikeste elektrilöökidega, mis juhivad seda ühes või teises suunas ja mida rakendavad neli olendi antennidesse implanteeritud elektroodi (cerci) ja selle kõhtu. Elektroodid kinnitatakse mesilasvahaga.
AI lisamine putukate otsimisele ja päästmisele
Uus algatus arendab UC Berkeley ja Singapuri Nanyangi tehnikaülikooli varasemat tööd, mis esmakordselt kavandati kasutades juhitavaid mardikaid USAR-i stsenaariumides.

2016. aasta uurimus mardika lennutrajektoori kontrollimiseks. Allikas: https://www.youtube.com/watch?v=iljHXpE4LG8
Kuigi mardikatel on täiendav lennuvõime, väheneb nende kandevõime hiljem, mis vähendab pardatehnoloogiate potentsiaalseid võimalusi ja viib energiatarbimise nõudmised kriitilisele tasemele, eriti juhul, kui on vaja käivitada masinõppe algoritm.
Uue algatuse pardal olev autonoomne inimese tuvastamise süsteem kasutab kujutiste klassifitseerimise mudelit tugivektori masin (SVM) ja Orienteeritud gradientide histogramm.
Prussaka liikumist juhib integreeritud navigatsioonisüsteem ja see suunab "bioboti" etteantud sihtkohta, teadmata vahepealseid takistusi. Enamasti lahendavad prussaka enda tohutud navigeerimisoskused enamiku probleemidest, mis on seotud muidu kättesaamatusse kohta jõudmisega.

Allikas: https://arxiv.org/abs/2105.10869
Pardal olev infrapunasüsteem jäädvustab pilte sagedusega 1 Hz, toimides edukalt pimedates kohtades ja teatades juhtmevabalt kõigist leitud ellujäänutest juhtimiskeskusesse reaalajas. Energia säästmiseks hakkab pildianalüüsi süsteem tööle ainult siis, kui selle käivitab positiivne infrapuna näit.
Mudel võtab enda alla vaid 18.3 kB välkmälu ja 52.2 kB staatilist muutmälu, saavutades arvutusajaks 95 millisekundit. Mõistlik töötlemisaeg on USAR-i stsenaariumi puhul oluline, kuna muidu võivad kauged infrapunasignatuurid töötlusintervallil vahele jääda, kui prussakas suunda muudab ja maastikku läbib.
Süsteemis on ka andurid temperatuuri, niiskuse ja CO2 jälgimiseks, et võimaliku päästekatse puhul teatada kohalikest tingimustest ja võimaldada juhtimiskeskusel olendit eemale juhtida igast teda ohustavast olukorrast.
Testimine simuleeritud maastikel
Süsteemi testiti simuleeritud katastroofi stsenaariumi järgi (pilt ülal) tõhusa takistuste kõrvaldamisega, välja arvatud teatud eriti rasketes konfiguratsioonides, mis hõlmavad peapööritavat tõusu, kuna prussakad on lisatud seadmete tõttu ebasoodsamas kaalus.

Algselt kaldus navigatsiooniarhitektuur takerduma ülekaalukate takistuste juurde, näiteks olukordadesse, kus isegi prussakas ei saanud enam edasi liikuda, ning seejärel töötasid teadlased välja ennustava tagasisidega navigeerimissüsteemi, et parandada jõudlust kõrgete takistustega silmitsi seistes. Süsteem suutis saavutada 100% edukuse määra ilma takistusteta või väheste takistusteta keskkondades ja kõrgema edukuse määra kõrgete takistuste korral.
Kui ebaõnnestumine juhtus, järeldavad teadlased, et seda saab parandada katse kestuse pikendamisega, kuigi see mõjutab loogiliselt ajakriitilist USAR-stsenaariumi.
Infrapunavaade
Sisseehitatud infrapunakaamera näitajad on tagasihoidlikud, töötades eraldusvõimega 32 × 32 pikslit ja 90-kraadise vaateväljaga. Kui pildid käivitatakse, lastakse need läbi keskmise müra vähendamise filtri.
Süsteem saavutab 87% edukuse määra inimeste eristamisel muudest termiliste signaalide tüüpidest, tõustes 90%ni, kui nad asuvad raadiuses 0.5 ja 1.5 m.
Energia ja kiibi suuruse piirangute tõttu ei ole esialgses uuringus pardal paiknevat lokaliseerimissüsteemi ja seega pole prussaka asukohta reaalajas võimalik jälgida. Teadlased viitavad sellele, et surnud arvestust saaks rakendada energiasäästulahendusena, kus madala energiatarbega asukohasignaalid edastatakse tagasi juhtimiskeskusesse.
Putukad otsingu- ja päästeoperaatoritena
Viimased kümme aastat on toonud kaasa hulga uurimisprojekte, mille eesmärk on kasutada putukate vastupidavust ja navigatsioonijõudu, et luua otsingu- ja päästestsenaariumide jaoks hübriid- või puhtaid robotsüsteeme. Lisaks sellele viimasele algatusele eelnenud 2016. aasta mardikatega seotud töödele on tehtud mitmeid katseid putukate võimeid puhtalt robotlikul kujul taasluua.
Nendeks on a 2019. aasta uurimisprojekt UoC-st mis pakkus ergonoomiliselt lihtsat prussaka põhimõtetel põhinevat robotit, mis on üks esimesi omataolisi projekte, mis tegeles robootiliste putukate äärmise haprusega.















