Robótica
Robots Caminan Más Rápidamente Con Pies Flexibles Recién Desarrollados
Roboticistas de la Universidad de California en San Diego han desarrollado pies flexibles para robots. La nueva tecnología puede resultar en robots que caminan un 40 por ciento más rápido en terrenos irregulares como guijarros y virutas de madera.
El nuevo desarrollo es importante para una variedad de aplicaciones diferentes, especialmente misiones de búsqueda y rescate.
La investigación se presentará en la conferencia RoboSoft, que será virtual y tendrá lugar entre el 15 de mayo y el 15 de julio de 2020.
Emily Lathrop es una estudiante de doctorado en la Escuela de Ingeniería Jacobs de la UC San Diego y la primera autora del artículo.
“Los robots necesitan poder caminar rápido y de manera eficiente en terrenos naturales e irregulares para que puedan ir a todos los lugares a los que pueden ir los humanos, pero quizás no deberían”, dijo Lathrop.
Michael T. Tolley es profesor en el Departamento de Ingeniería Mecánica y Aeroespacial de la UC San Diego. Es el autor senior del artículo.
“Por lo general, los robots solo pueden controlar el movimiento en articulaciones específicas”, dijo Tolley. “En este trabajo, demostramos que un robot que puede controlar la rigidez, y por lo tanto la forma, de sus pies supera a los diseños tradicionales y puede adaptarse a una amplia variedad de terrenos”.
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Pies Robóticos Flexibles
Los pies robóticos flexibles consisten en una membrana de látex que está llena de granos de café. Los granos de café pueden cambiar entre actuar como un sólido y un líquido. El mecanismo que permite que los medios granulares, como los granos de café, actúen de esta manera se llama atasco granular. Como resultado, los robots pueden caminar más rápido y tener un mejor agarre.
Cuando los pies del robot tocan el suelo, se vuelven firmes y se conforman a la superficie para establecer una base sólida. Cuando se mueven, los pies se desatan y se aflojan entre pasos, y se confían en estructuras de soporte para ayudarlos a mantenerse flexibles mientras están atascados.
Estos pies flexibles fueron los primeros de su tipo en ser probados en superficies irregulares.

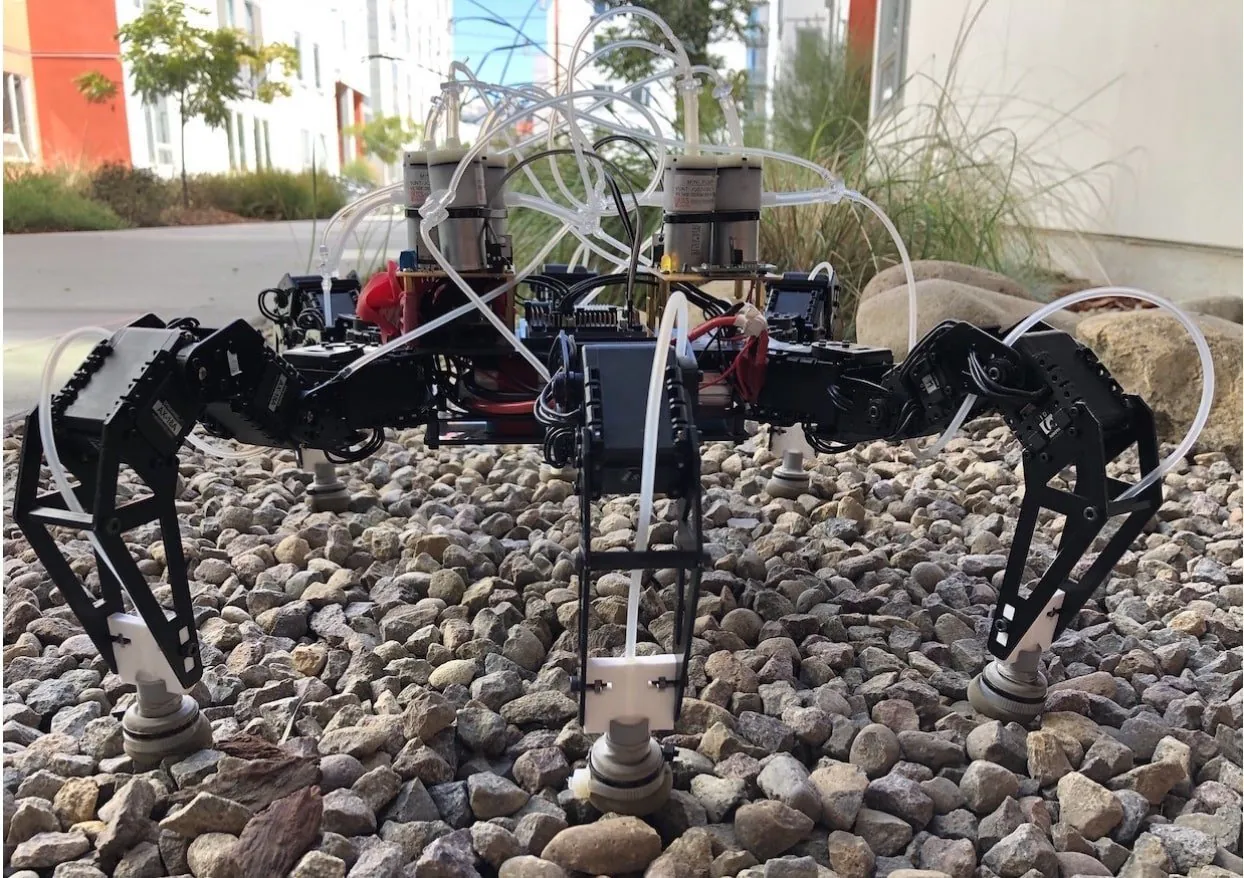
Los investigadores instalaron los pies en un robot hexápodo y diseñaron y construyeron un sistema a bordo. El sistema a bordo es capaz de generar presión negativa y presión positiva para desatar y atascar los pies entre cada paso. Para atascar los pies, una bomba de vacío elimina el aire entre los granos de café. También pueden ser atascados pasivamente si el peso del robot fuerza el aire fuera de los granos de café.
Superficies Irregulares
El robot se probó caminando en una variedad de superficies diferentes, incluyendo suelo plano, virutas de madera y guijarros, con y sin los pies flexibles. Los hallazgos fueron que el atasco pasivo es más efectivo en suelo plano y el atasco activo es mejor en rocas sueltas.
Con los pies flexibles, las patas del robot pudieron agarrar el suelo mejor, lo que a su vez aumentó su velocidad. Esto fue especialmente cierto cuando el robot caminó cuesta arriba y en terrenos irregulares.
Nick Gravish es profesor en el Departamento de Ingeniería Mecánica y Aeroespacial de la UC San Diego y coautor del estudio.
“El mundo natural está lleno de terrenos desafiantes para los robots que caminan — superficies resbalosas, rocosas y esponjosas hacen que caminar sea complicado”, dijo Gravish. “Pies que pueden adaptarse a estos diferentes tipos de suelo pueden ayudar a los robots a mejorar su movilidad”.
Los investigadores ahora intentarán incorporar sensores suaves en la parte inferior de los pies, lo que permitirá utilizar una tarjeta de control electrónico. La tarjeta de control electrónico identificaría el tipo de suelo que el robot va a caminar y si los pies necesitan ser atascados activa o pasivamente. Los investigadores también continuarán mejorando los algoritmos de diseño y control para una mayor eficiencia.












