
Ρομποτική
Πώς μαθαίνουν τα ρομπότ να ζητούν βοήθεια

Στον εξελισσόμενο κόσμο της ρομποτικής, ξεχωρίζει μια πρωτοποριακή συνεργασία μεταξύ του Πανεπιστημίου του Πρίνστον και της Google. Μηχανικοί από αυτά τα διάσημα ιδρύματα έχουν αναπτύξει μια καινοτόμο μέθοδο που διδάσκει στα ρομπότ μια κρίσιμη δεξιότητα: να αναγνωρίζουν πότε χρειάζονται βοήθεια και πώς να τη ζητήσουν. Αυτή η εξέλιξη σηματοδοτεί ένα σημαντικό άλμα προς τα εμπρός στη ρομποτική, γεφυρώνοντας το χάσμα μεταξύ της αυτόνομης λειτουργίας και της αλληλεπίδρασης ανθρώπου-ρομπότ.
Το ταξίδι προς πιο έξυπνα και ανεξάρτητα ρομπότ ανέκαθεν παρεμποδιζόταν από μια σημαντική πρόκληση: την πολυπλοκότητα και την ασάφεια της ανθρώπινης γλώσσας. Σε αντίθεση με τη δυαδική σαφήνεια των κωδικών υπολογιστών, η ανθρώπινη γλώσσα είναι γεμάτη αποχρώσεις και λεπτές αποχρώσεις, καθιστώντας την έναν λαβύρινθο για τα ρομπότ. Για παράδειγμα, μια εντολή τόσο απλή όπως «σηκώστε το μπολ» μπορεί να γίνει πολύπλοκη εργασία όταν υπάρχουν πολλά μπολ. Τα ρομπότ, εξοπλισμένα να αισθάνονται το περιβάλλον τους και να ανταποκρίνονται στη γλώσσα, συχνά βρίσκονται σε σταυροδρόμι όταν αντιμετωπίζουν τέτοιες γλωσσικές αβεβαιότητες.
Ποσοτικοποίηση της αβεβαιότητας
Αντιμετωπίζοντας αυτήν την πρόκληση, η ομάδα του Πρίνστον και της Google εισήγαγε μια νέα προσέγγιση που ποσοτικοποιεί τη «ασάφεια» της ανθρώπινης γλώσσας. Αυτή η τεχνική ουσιαστικά μετρά το επίπεδο αβεβαιότητας στις γλωσσικές εντολές και χρησιμοποιεί αυτή τη μέτρηση για να καθοδηγήσει τις ενέργειες του ρομπότ. Σε περιπτώσεις όπου μια εντολή μπορεί να οδηγήσει σε πολλαπλές ερμηνείες, το ρομπότ μπορεί τώρα να μετρήσει το επίπεδο αβεβαιότητας και να αποφασίσει πότε θα αναζητήσει περαιτέρω διευκρινίσεις. Για παράδειγμα, σε ένα περιβάλλον με πολλά μπολ, ένας υψηλότερος βαθμός αβεβαιότητας θα ωθούσε το ρομπότ να ρωτήσει ποιο μπολ να πάρει, αποφεύγοντας έτσι πιθανά σφάλματα ή αναποτελεσματικότητα.
Αυτή η προσέγγιση όχι μόνο δίνει τη δυνατότητα στα ρομπότ να κατανοούν καλύτερα τη γλώσσα, αλλά επίσης ενισχύει την ασφάλεια και την αποτελεσματικότητά τους στην εκτέλεση εργασιών. Με την ενσωμάτωση μεγάλων γλωσσικών μοντέλων (LLM) όπως αυτά πίσω από το ChatGPT, οι ερευνητές έχουν κάνει ένα σημαντικό βήμα στην ευθυγράμμιση των ρομποτικών ενεργειών πιο στενά με τις ανθρώπινες προσδοκίες και ανάγκες.
Ο ρόλος των μεγάλων γλωσσικών μοντέλων
Η ενσωμάτωση των LLMs παίζει καθοριστικό ρόλο σε αυτή τη νέα προσέγγιση. Τα LLM είναι καθοριστικά για την επεξεργασία και την ερμηνεία της ανθρώπινης γλώσσας. Σε αυτό το πλαίσιο, χρησιμοποιούνται για την αξιολόγηση και τη μέτρηση της αβεβαιότητας που υπάρχει στις γλωσσικές εντολές που δίνονται στα ρομπότ.
Ωστόσο, η εξάρτηση από τα LLMs δεν είναι χωρίς προκλήσεις. Όπως επισημαίνεται από την ερευνητική ομάδα, τα αποτελέσματα από τα LLM μπορεί μερικές φορές να είναι αναξιόπιστα.
Ο Anirudha Majumdar, επίκουρος καθηγητής στο Πρίνστον, τονίζει τη σημασία αυτής της ισορροπίας:
«Η τυφλή παρακολούθηση των σχεδίων που δημιουργούνται από ένα LLM θα μπορούσε να προκαλέσει τα ρομπότ να ενεργούν με ανασφαλή ή αναξιόπιστο τρόπο, και έτσι χρειαζόμαστε τα ρομπότ μας που βασίζονται στο LLM να γνωρίζουν πότε δεν το γνωρίζουν».
Αυτό υπογραμμίζει την ανάγκη για μια διαφοροποιημένη προσέγγιση, όπου τα LLM χρησιμοποιούνται ως εργαλεία καθοδήγησης και όχι ως αλάνθαστοι λήπτες αποφάσεων.
Πρακτική Εφαρμογή και Δοκιμές
Η πρακτικότητα αυτής της μεθόδου έχει δοκιμαστεί σε διάφορα σενάρια, καταδεικνύοντας την ευελιξία και την αποτελεσματικότητά της. Ένα τέτοιο τεστ περιελάμβανε έναν ρομποτικό βραχίονα, ο οποίος είχε ως αποστολή να ταξινομεί παιχνίδια τροφίμων σε διαφορετικές κατηγορίες. Αυτή η απλή ρύθμιση απέδειξε την ικανότητα του ρομπότ να πλοηγείται αποτελεσματικά στις εργασίες με ξεκάθαρες επιλογές.
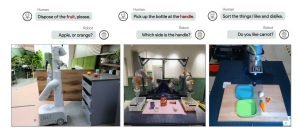
Εικόνα: Πανεπιστήμιο Πρίνστον
Η πολυπλοκότητα αυξήθηκε σημαντικά σε ένα άλλο πείραμα που περιείχε έναν ρομποτικό βραχίονα τοποθετημένο σε μια πλατφόρμα με τροχούς σε μια κουζίνα γραφείου. Εδώ, το ρομπότ αντιμετώπισε πραγματικές προκλήσεις, όπως η αναγνώριση του σωστού αντικειμένου που έπρεπε να τοποθετήσει σε φούρνο μικροκυμάτων όταν του παρουσιάζονταν πολλές επιλογές.
Μέσω αυτών των δοκιμών, τα ρομπότ απέδειξαν επιτυχώς την ικανότητά τους να χρησιμοποιούν την ποσοτικοποιημένη αβεβαιότητα για να λάβουν αποφάσεις ή να αναζητήσουν διευκρινίσεις, επικυρώνοντας έτσι την πρακτική χρησιμότητα αυτής της μεθόδου.
Μελλοντικές Επιπτώσεις και Έρευνα
Κοιτάζοντας το μέλλον, οι επιπτώσεις αυτής της έρευνας εκτείνονται πολύ πέρα από τις τρέχουσες εφαρμογές. Η ομάδα, με επικεφαλής τον Majumdar και τον μεταπτυχιακό φοιτητή Allen Ren, διερευνά πώς αυτή η προσέγγιση μπορεί να εφαρμοστεί σε πιο σύνθετα προβλήματα στην αντίληψη των ρομπότ και στην τεχνητή νοημοσύνη. Αυτό περιλαμβάνει σενάρια όπου τα ρομπότ πρέπει να συνδυάσουν πληροφορίες όρασης και γλώσσας για να λάβουν αποφάσεις, κλείνοντας περαιτέρω το χάσμα μεταξύ της ρομποτικής κατανόησης και της ανθρώπινης αλληλεπίδρασης.
Η συνεχιζόμενη έρευνα στοχεύει όχι μόνο να ενισχύσει την ικανότητα των ρομπότ να εκτελούν εργασίες με μεγαλύτερη ακρίβεια, αλλά και να περιηγούνται στον κόσμο με κατανόηση παρόμοια με την ανθρώπινη γνώση. Αυτή η έρευνα θα μπορούσε να ανοίξει το δρόμο για ρομπότ που όχι μόνο είναι πιο αποτελεσματικά και ασφαλέστερα, αλλά και πιο εναρμονισμένα με τις διαφορετικές απαιτήσεις του ανθρώπινου περιβάλλοντος.
Μπορείτε να βρείτε τη δημοσιευμένη έρευνα εδώ.















