
Robotics
En kakerlak med AI-aktiveret eftersøgnings- og redningsudstyr
Internationale robotforskere har udviklet et Urban Search And Rescue-system (USAR), der bruger en 'styrbar' levende kakerlak til at transportere et miniaturiseret infrarødt overlevelsesdetektionssystem med maskinlæring gennem ellers ikke-navigerbare katastrofescenarier.
systemet er et samarbejde mellem forskningsafdelinger i Singapore, Kina, Tyskland og Storbritannien. Den bruger Madagaskar kakerlak som et køretøj og har strøm nok til at køre i flere timer.
Kilde: https://arxiv.org/abs/2105.10869
Hybridredningssystemet har en maskinlæringsmodel til menneskelig detektion, der blev trænet på infrarøde (IR) billeder og driver det mobile IR-detektionssystem, som kan fungere autonomt efter behov, og rapporterer fundne overlevende tilbage til en baseoperationsstation.
Begrænsede lokale ressourcer
Maskinlæringsrammen er påkrævet for at fungere på ekstraordinært slanke ressourcer: Kun 191.8 kB statisk RAM og 1988 kB Flash-hukommelse er tilbage til systemet fra de generelle strømkrav til enheden, som også skal give den elektriske stimulans til insektet.

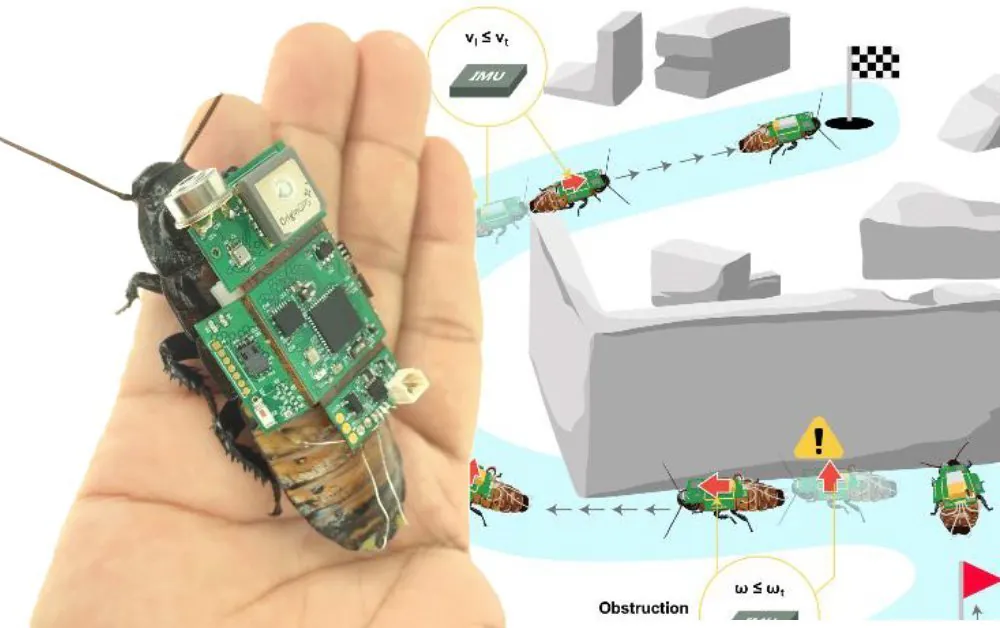
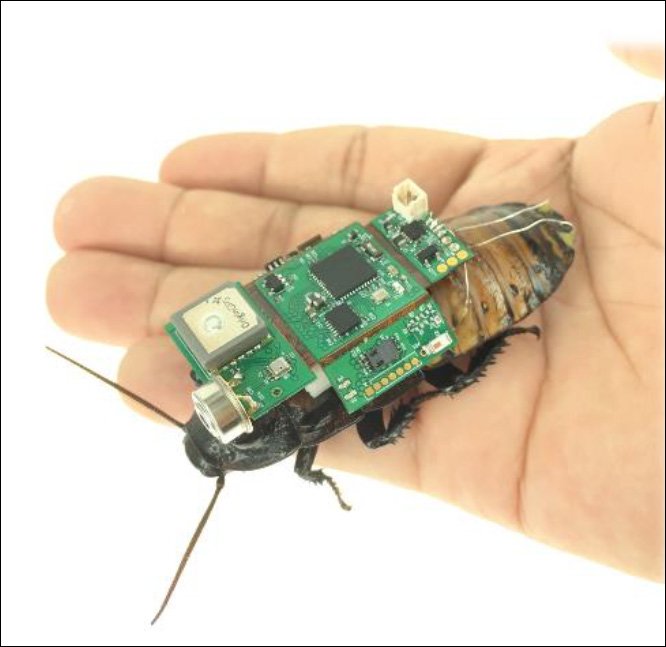
De tre funktionelle blokke af kakerlakkens rygsæk, afbilledet ovenfor, inkluderer trådløs stimulering, en primær controllerenhed og perifere komponenter, med det IR-afledte maskinlæringssystem og navigationsfunktionaliteten indlejret i den primære controllerenhed. Riggens kredsløb er blevet opdelt i flere komponenter for bedre at passe til kakerlakkens geometri.
Madagaskar-kakerlakken (blandt største art i verden, med en maksimal belastningskapacitet på 15g) styres af små elektriske stød, der styrer den i den ene eller anden retning, implementeret af fire elektroder implanteret i væsnets antenner (Cerci), og ind i dens underliv. Elektroderne er sikret med bivoks.
Tilføjelse af AI til insektsøgning og -redning
Det nye initiativ udvikler tidligere arbejde fra UC Berkeley og Singapores Nanyang Technological University, som først udtænkte ved hjælp af styrbare biller i USAR-scenarier.

2016 forskning i at kontrollere flyvebanen for en bille. Kilde: https://www.youtube.com/watch?v=iljHXpE4LG8
Selvom biller har den ekstra evne til at flyve, reduceres deres belastningskapacitet efterfølgende, hvilket sænker de potentielle muligheder for teknologier ombord og bringer strømforbrugskravene til et kritisk niveau, især i tilfælde, hvor det er nødvendigt at køre en maskinlæringsalgoritme.
Det indbyggede autonome menneskelige genkendelsessystem i det nye initiativ bruger en billedklassificeringsmodel, der anvender understøtte vektor maskine (SVM) og Histogram af orienterede gradienter.
Kakerlakkens bevægelse styres af det integrerede navigationssystem og guider 'biobot'en til en forudbestemt destination uden kendskab til de mellemliggende forhindringer. For det meste løser kakerlakkens egne formidable navigationsevner de fleste problemer med at ankomme til et ellers uopnåeligt sted.

Kilde: https://arxiv.org/abs/2105.10869
Det indbyggede infrarøde system optager billeder ved 1 Hz, fungerer med succes i mørke områder og rapporterer trådløst alle lokaliserede overlevende til et kommandocenter i realtid. For at spare energi begynder billedanalysesystemet kun at fungere, hvis det udløses af en positiv infrarød aflæsning.
Modellen fylder kun 18.3 kB Flash-hukommelse og 52.2 kB statisk RAM, hvilket opnår en beregningstid på 95 millisekunder. Rimelig behandlingstid er afgørende i et USAR-scenarie, da fjerne infrarøde signaturer ellers kunne gå glip af i behandlingsintervallet, når kakerlakken ændrer retning og krydser terræn.
Systemet har også sensorer til at overvåge temperatur, luftfugtighed og CO2 for at rapportere lokale forhold for et muligt redningsforsøg og for at tillade kontrolcentret at styre væsnet væk fra enhver situation, der ville bringe det i fare.
Test i simulerede terræn
Systemet blev testet i et simuleret katastrofescenarie (billede ovenfor) med effektiv forhindringsforhandling, undtagen i visse særligt udfordrende konfigurationer, der involverer svimlende stigninger, da kakerlakken har en vægtmæssig ulempe på grund af det vedhæftede udstyr.

Navigationsarkitekturen havde oprindeligt en tendens til at sidde fast ved overvældende forhindringer, såsom situationer, hvor selv kakerlakken ikke kunne komme videre, og forskerne udviklede efterfølgende et forudsigende feedback-navigationssystem for at forbedre ydeevnen i lyset af høje forhindringer. Systemet var i stand til at opnå en succesrate på 100 % i miljøer med ingen eller lave forhindringer, og en højere succesrate med høje forhindringer.
Hvor fejl opstod, konkluderer forskerne, at dette kunne afhjælpes ved at øge eksperimentets varighed, selvom dette logisk set har implikationer i et tidskritisk USAR-scenarie.
Infrarød visning
Det indbyggede infrarøde kamera har beskedne specifikationer, der opererer ved 32×32 pixels med et 90-graders synsfelt. Billederne, når de udløses, føres gennem et median forbrændingsfilter.
Systemet opnår en succesrate på 87 % i at skelne menneskelige forsøgspersoner fra andre typer termiske signaturer, hvilket stiger til 90 % i en nærhedsradius på 0.5 m og 1.5 m.
På grund af energi- og chipstørrelsesbegrænsninger har den indledende undersøgelse ikke et lokaliseringssystem ombord, og det er derfor ikke muligt at spore kakerlakkens position i realtid. Forskerne foreslår, at dead reckoning kunne implementeres som en strømbesparende løsning, med lavenergi-lokaliseringssignaler, der sendes tilbage til kontrolcentret i fremtidige implementeringer.
Insekter som eftersøgnings- og redningsoperatører
De sidste ti år har bragt en bølge af forskningsprojekter, der søger at udnytte insekters modstandskraft og navigationskraft til at skabe hybride eller rene robotsystemer til eftersøgnings- og redningsscenarier. Udover det 2016 bille-relaterede arbejde, der går forud for dette seneste initiativ, har der været en række forsøg på at genskabe insektoide-egenskaber i ren robotform.
Disse omfatter a 2019 forskningsprojekt fra UoC som tilbød en ergonomisk simpel robot baseret på en kakerlaks principper, et af de første projekter af sin art, der adresserede robotinsekternes ekstreme skrøbelighed.















