Robotik
AI hjælper mikroroboter med at lære at svømme og navigere
Et hold af forskere fra Santa Clara University, New Jersey Institute of Technology og University of Hong Kong har med succes brugt dyb forstærket læring til at lære mikroroboter at svømme. Den nye udvikling er et stort skridt fremad i mikrosvømningskapaciteter.
Eksperter har konstant fokuseret på at skabe kunstige mikroschwimmere, der kan navigere på samme måde som naturligt forekommende svømmende mikroorganismer, såsom bakterier. Disse mikroschwimmere kunne bruges til en række biomedicinske formål i fremtiden, såsom målrettet medicinlevering og mikrokirurgi. Selv med fokus på udvikling kan de fleste kunstige mikroschwimmere i dag kun udføre simple manøvrer med faste lokomotoriske gangarter.
Den nye studie er offentliggjort i Communications Physics.
At lære mikroschwimmere med AI
I studiet mente holdet, at AI kunne lære mikroschwimmere at tilpasse sig til ændrede betingelser. Mikroschwimmere, ligesom mennesker, kræver forstærket læring og feedback for at lære at svømme, men de har en unik sæt udfordringer.
On Shun Pak er en associeret professor i mekanisk ingeniørvidenskab på Santa Clara University.
“At kunne svømme på mikroskala i sig selv er en udfordrende opgave,” sagde On Shun Pak. “Når du vil have en mikroschwimmer til at udføre mere avancerede manøvrer, kan designet af deres lokomotoriske gangarter hurtigt blive uoverskueligt.”
Kombination af ANNs og forstærket læring
Holdet kombinerede kunstige neurale netværk (ANNs) og forstærket læring for at lære en simpel mikroschwimmer at svømme og navigere i en vilkårlig retning. Mikroschwimmere modtager feedback på deres specifikke handlinger, som den så bruger til at lære at svømme baseret på dens erfaring med at interagere med miljøet.
Alan Tsang er en assistentprofessor i mekanisk ingeniørvidenskab på University of Hong Kong.
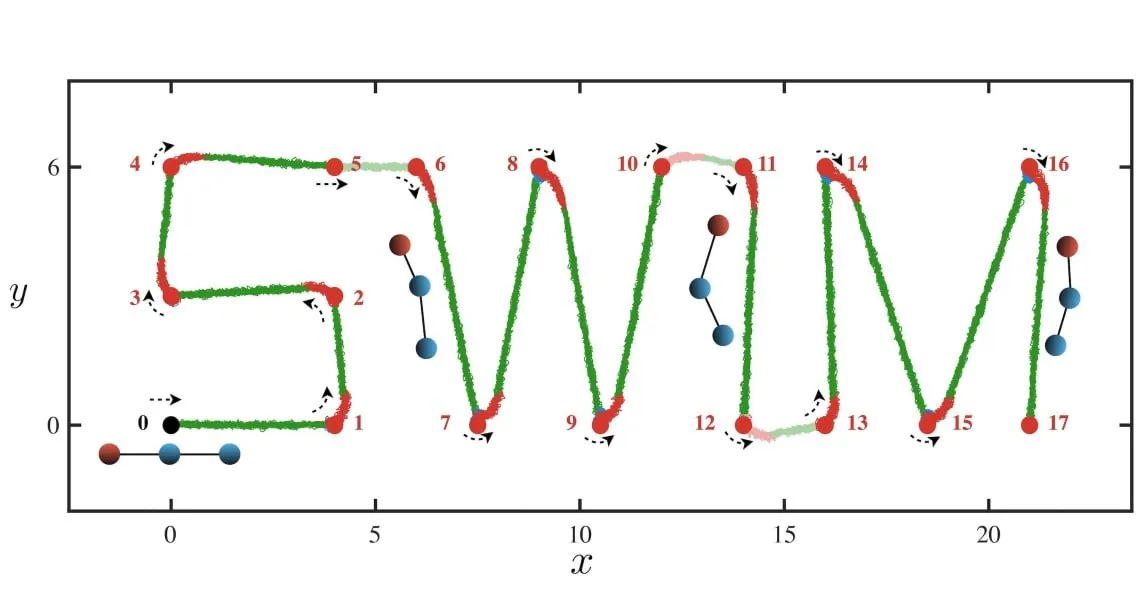
“Ligesom et menneske, der lærer at svømme, lærer mikroschwimmere, hvordan den skal bevæge sine ‘kroppsdele’ – i dette tilfælde tre mikropartikler og udvidelige forbindelser – for at selvpropellere og dreje,” sagde Tsang. “Den gør det uden at afhænge af menneskelig viden, men kun på en maskinlæringsalgoritme.”
AI-drevne svømmere kan skifte mellem forskellige lokomotoriske gangarter adaptivt, hvilket giver dem mulighed for at navigere mod enhver målposition på egen hånd.
Forskerne demonstrerede mikroschwimmerens kraft ved at aktivere den til at følge en kompleks vej uden at være udtrykkeligt programmeret.
Yuan-nan Young er en professor i matematiske videnskaber på New Jersey Institute of Technology.
“Dette er vores første skridt i at tackle udfordringen med at udvikle mikroschwimmere, der kan tilpasse sig som biologiske celler i navigation af komplekse miljøer autonomt,” sagde Yuan-nan Young.
Adaptive beteender som disse er, hvad der giver så stor løfte for biomedicinske formål.
Arnold Mathijssen er en ekspert på mikroroboter og biofysik på University of Pennsylvania. Han var ikke involveret i forskningen.
“Dette arbejde er et nøgleeksempel på, hvordan den hurtige udvikling af kunstig intelligens kan udnyttes til at tackle uløste udfordringer i lokomotionsproblemer i fluidodynamik,” sagde Mathijssen. “Integrationen mellem maskinlæring og mikroschwimmere i dette arbejde vil give anledning til yderligere forbindelser mellem disse to højt aktive forskningsområder.”












