
Роботика
Хлебарка с оборудване за търсене и спасяване с AI
Международни изследователи в областта на роботиката са разработили система за градско търсене и спасяване (USAR), която използва „управляема“ жива хлебарка, за да транспортира миниатюризирана инфрачервена система за откриване на оцелели с възможност за машинно обучение през сценарии на бедствия, които иначе са невъзможни за навигация.
- система е сътрудничество между изследователски отдели в Сингапур, Китай, Германия и Обединеното кралство. Той използва Мадагаскарска хлебарка като превозно средство и има достатъчно мощност, за да работи няколко часа.
Източник: https://arxiv.org/abs/2105.10869
Хибридната спасителна система разполага с модел за машинно обучение за откриване на хора, който е обучен на инфрачервени (IR) изображения и захранва мобилната система за IR откриване, която може да работи автономно, ако е необходимо, като докладва намерените оцелели обратно към базовата операционна станция.
Ограничени местни ресурси
Рамката за машинно обучение е необходима, за да работи с изключително малки ресурси: само 191.8 kB статична RAM и 1988 kB флаш памет са останали за системата от общите изисквания за захранване на устройството, което също трябва да осигури електрическия стимул за насекомото.

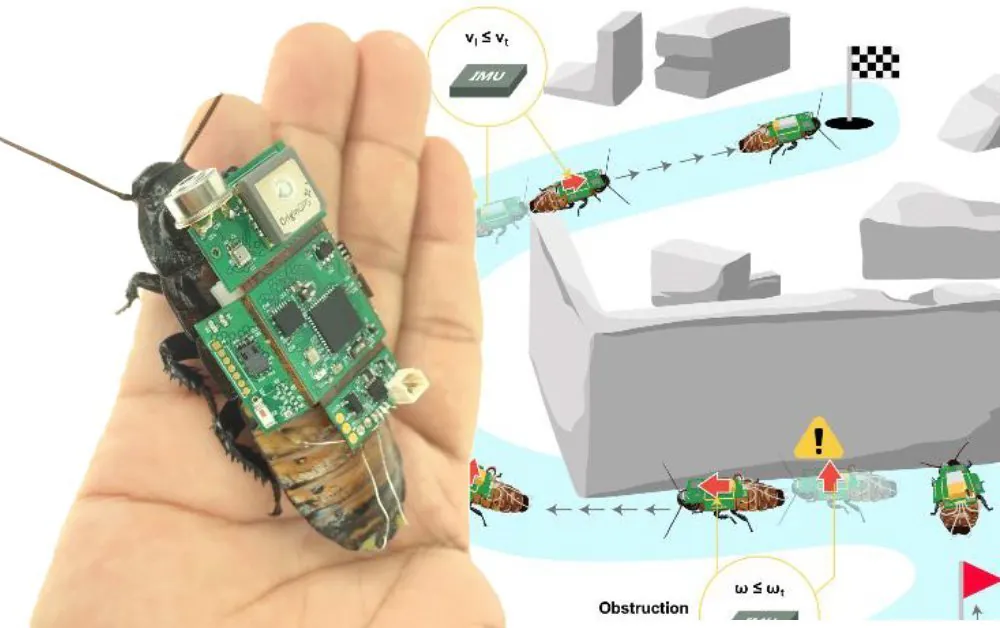
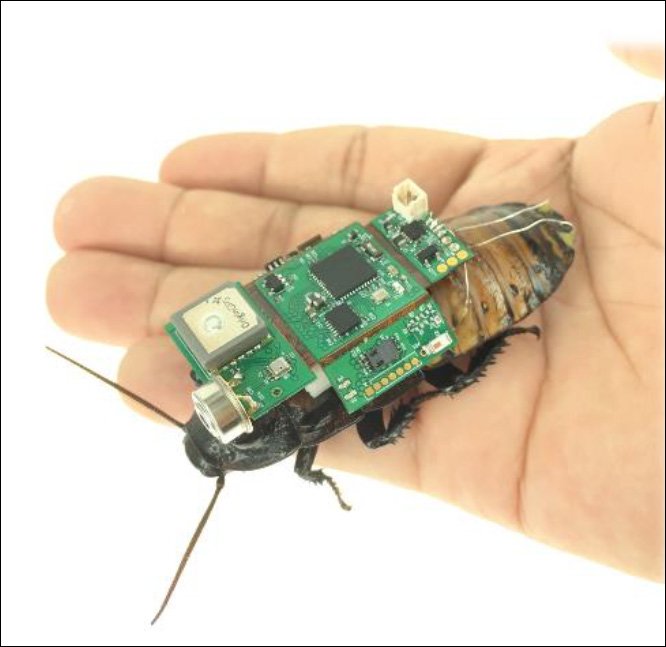
Трите функционални блока на раницата на хлебарка, показана на снимката по-горе, включват безжична стимулация, първичен контролен блок и периферни компоненти, с IR-извлечена система за машинно обучение и навигационната функционалност, вградени в основния контролен блок. Веригата на платформата е разделена на няколко компонента, за да пасне по-добре на геометрията на хлебарка.
Мадагаскарската хлебарка (сред най-големият вид в света, с максимален капацитет на натоварване от 15 g) се контролира от малки електрически удари, които го насочват в една или друга посока, изпълнявани от четири електрода, имплантирани в антените на създанието (потърсете), и в корема му. Електродите са закрепени с пчелен восък.
Добавяне на AI към търсене и спасяване на насекоми
Новата инициатива развива предишна работа от Калифорнийския университет в Бъркли и Сингапурския технологичен университет Нанянг, които първи замислиха използване на управляеми бръмбари в сценарии на USAR.

Изследване от 2016 г. за контролиране на траекторията на полета на бръмбар. Източник: https://www.youtube.com/watch?v=iljHXpE4LG8
Въпреки че бръмбарите имат добавената способност за летене, тяхната товароносимост впоследствие намалява, намалявайки потенциалните възможности на бордовите технологии и довеждайки изискванията за консумация на енергия до критично ниво, особено в случай, когато е необходимо да се стартира алгоритъм за машинно обучение.
Вградената автономна система за разпознаване на хора в новата инициатива използва модел за класификация на изображения, използвайки поддържаща векторна машина (SVM) и Хистограма на ориентирани градиенти.
Движението на хлебарката се насочва от интегрираната навигационна система и насочва „биобота“ до предварително определена дестинация, без да знае за препятствията. В по-голямата си част собствените страхотни навигационни умения на хлебарката решават повечето проблеми при пристигането на иначе недостижимо място.

Източник: https://arxiv.org/abs/2105.10869
Вградената инфрачервена система улавя изображения при 1 Hz, работи успешно в тъмни зони и безжично докладва всички открити оцелели на команден център в реално време. За да спести енергия, системата за анализ на изображения започва да работи само ако се задейства от положително инфрачервено отчитане.
Моделът заема само 18.3kB флаш памет и 52.2kB статична RAM, постигайки време за изчисление от 95 милисекунди. Разумното време за обработка е от съществено значение при сценарий на USAR, тъй като в противен случай далечните инфрачервени сигнатури биха могли да бъдат пропуснати в интервала на обработка, докато хлебарката променя посоката си и пресича терена.
Системата също така включва сензори за наблюдение на температурата, влажността и CO2, за да докладва местните условия за евентуален опит за спасяване и да позволи на контролния център да насочи съществото далеч от всяка ситуация, която би го застрашила.
Тестване в симулирани терени
Системата беше тествана в симулиран сценарий на бедствие (изображението по-горе), с ефективно преодоляване на препятствията, с изключение на някои особено предизвикателни конфигурации, включващи световъртежни изкачвания, тъй като хлебарката е в неизгодно положение поради прикрепеното оборудване.

Архитектурата на навигацията първоначално имаше тенденция да се забива при огромни препятствия, като например ситуации, при които дори хлебарката не можеше да продължи, и впоследствие изследователите разработиха навигационна система с предсказуема обратна връзка, за да подобрят производителността при високи препятствия. Системата успя да постигне 100% успеваемост в среди без или с ниски препятствия и по-висока успеваемост при високи препятствия.
Когато е възникнал неуспех, изследователите заключават, че това може да бъде коригирано чрез увеличаване на продължителността на експеримента, въпреки че това логично има последици в критичен за времето сценарий на USAR.
Инфрачервен изглед
Вградената инфрачервена камера има скромни спецификации, работещи при 32×32 пиксела с 90-градусово зрително поле. Изображенията, когато се задействат, преминават през среден филтър за премахване на шума.
Системата постига 87% успеваемост при разграничаване на човешки субекти от други видове термични сигнатури, нараствайки до 90%, когато е в радиус на близост от 0.5 m и 1.5 m.
Поради ограниченията на енергията и размера на чипа, първоначалното проучване не включва вградена система за локализиране и следователно не е възможно да се проследи позицията на хлебарка в реално време. Изследователите предполагат, че мъртвото отчитане може да бъде приложено като решение за пестене на енергия, с нискоенергийни сигнали за местоположение, препредадени обратно към контролния център, в бъдещи реализации.
Насекомите като оператори за търсене и спасяване
Последните десет години донесоха вълна от изследователски проекти, които се стремят да използват устойчивостта и навигационната мощ на насекомите за създаване на хибридни или чисто роботизирани системи за сценарии за търсене и спасяване. Освен работата, свързана с бръмбарите през 2016 г., която предхожда тази последна инициатива, имаше редица опити за пресъздаване на инсектоидни способности в чисто роботизирана форма.
Те включват a 2019 изследователски проект от UoC който предлага ергономично прост робот, базиран на принципите на хлебарка, един от първите проекти от този вид, насочен към изключителната крехкост на роботизираните насекоми.















