Robot
Tay cầm Robot linh hoạt được hướng dẫn bởi Kính thực tế ảo AR
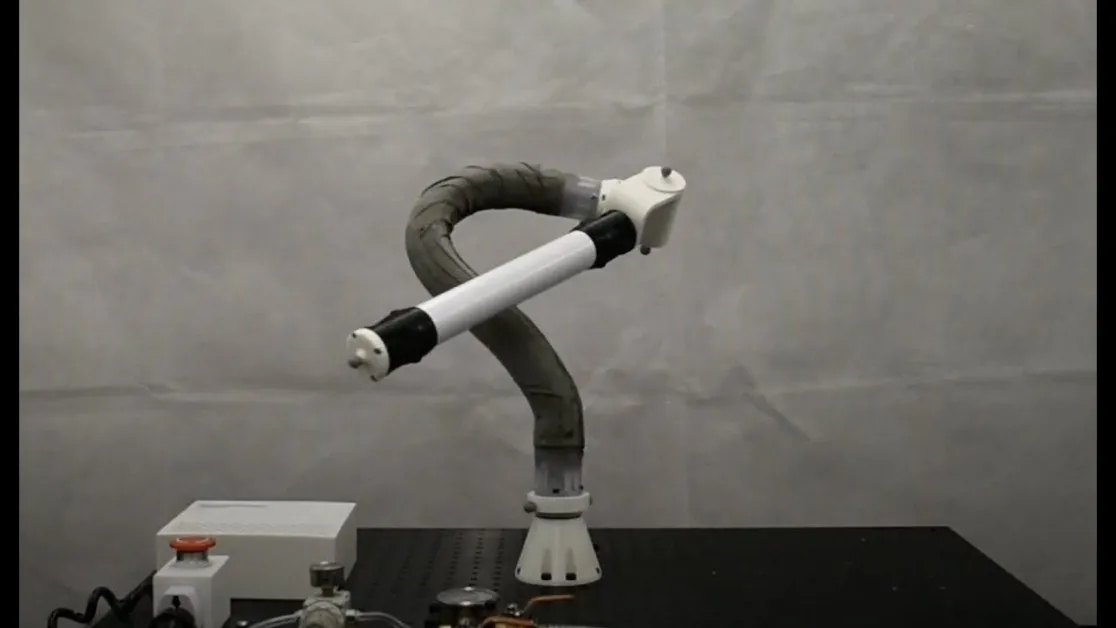
Các nhà nghiên cứu tại Imperial College London đã tạo ra một tay cầm robot linh hoạt có thể được hướng dẫn bởi một cá nhân sử dụng kính thực tế ảo (AR). Tay cầm robot高度 tùy chỉnh có thể được uốn cong và xoay ở tất cả các hướng và được sử dụng trong các lĩnh vực như bảo trì tàu vũ trụ, sản xuất và phục hồi chấn thương.
Người dùng có thể uốn cong thủ công tay cầm của robot vào hình dạng mong muốn cho mỗi nhiệm vụ, và điều này là có thể do các lớp tấm mylar nằm bên trong. Mỗi một trong số các tấm mylar này trượt lên nhau và có thể khóa vào vị trí. Tuy nhiên, một số người dùng gặp khó khăn khi uốn cong robot mà không có hướng dẫn.
Triển khai công nghệ AR
Để vượt qua một số thách thức này, nhóm nghiên cứu tại Phòng thí nghiệm REDS (Robotic manipulation: Engineering, Design, and Science) của Imperial đã thiết kế hệ thống để người dùng có thể dựa vào AR để cấu hình robot. Với kính thực tế ảo thông minh và máy ảnh theo dõi chuyển động, người dùng được trình bày với các mẫu và thiết kế được chồng lên môi trường thế giới thực. Tay cầm robot sau đó có thể được điều chỉnh để phù hợp với mẫu. Để làm cho mọi thứ dễ dàng hơn, mẫu sẽ chuyển sang màu xanh lá cây khi cấu hình thành công được đạt được, và robot sẽ khóa vào vị trí.
Tiến sĩ Nicolas Rojas từ Trường Thiết kế Kỹ thuật Dyson của Imperial là tác giả chính của bài báo nghiên cứu.
“Một trong những vấn đề chính trong việc điều chỉnh các robot này là độ chính xác trong vị trí mới của chúng. Chúng ta không giỏi trong việc đảm bảo vị trí mới phù hợp với mẫu, đó là lý do tại sao chúng tôi tìm kiếm sự giúp đỡ từ AR,” Tiến sĩ Rojas cho biết.
“Chúng tôi đã chứng minh rằng AR có thể đơn giản hóa việc làm việc cùng với robot dẻo của chúng tôi. Phương pháp này cung cấp cho người dùng một loạt các vị trí robot dễ tạo, cho tất cả các ứng dụng, mà không cần quá nhiều chuyên môn kỹ thuật.”
Thử nghiệm và Áp dụng Hệ thống
Hệ thống đã được thử nghiệm trên năm người đàn ông từ 20-26 tuổi có kinh nghiệm trong lĩnh vực robot. Tuy nhiên, họ không có kinh nghiệm trong việc điều khiển robot dẻo. Theo bài báo đã xuất bản, họ đã có thể điều chỉnh robot một cách thành công và chính xác với hệ thống mới.
Có nhiều ứng dụng cho một hệ thống như này, chẳng hạn như sản xuất và bảo trì xe. Trọng lượng nhẹ của tay cầm làm cho nó đặc biệt phù hợp cho bảo trì tàu vũ trụ, và sự dịu dàng của nó cho phép nó được sử dụng trong phục hồi chấn thương.
Nghiên cứu sinh tiến sĩ Alex Ranne và Angus Clark là đồng tác giả đầu tiên của nghiên cứu.
“Trong nhiều cách, nó có thể được xem như một cánh tay thứ ba rời và dẻo. Nó có thể giúp trong nhiều tình huống mà một cánh tay phụ có thể hữu ích và giúp phân chia công việc,” cặp đôi cho biết.
Các nhà nghiên cứu sẽ tiếp tục làm việc để cải thiện robot và AR của nó, và họ sẽ cố gắng giới thiệu các yếu tố chạm và âm thanh để tăng độ chính xác của robot. Một mục tiêu chính khác là tăng cường độ bền của robot, vì chúng trở nên kém cứng khi bị khóa vào vị trí. Những đặc điểm này có thể ảnh hưởng đến cả độ chính xác và độ tin cậy.
