Robotik
Robotlar Yeni Geliştirilen Esnek Ayaklarla Daha Hızlı Yürüyor
Kaliforniya San Diego Üniversitesi’ndeki robotik uzmanları, robotlar için esnek ayaklar geliştirdiler. Yeni teknoloji, robotların çakıl ve odun talaşı gibi düzensiz arazilerde %40 daha hızlı yürüyebilmesine neden olabilir.
Yeni gelişme, özellikle arama ve kurtarma görevleri gibi çeşitli uygulamalar için önemlidir.
Araştırma, RoboSoft konferansında sunulacak, konferans sanal olarak 15 Mayıs – 15 Temmuz 2020 tarihleri arasında gerçekleştirilecek.
Emily Lathrop, UC San Diego’deki Jacobs Mühendislik Okulu’nda doktora öğrencisi ve makalenin ilk yazarı.
“Robotların, insanların gidebileceği her yere gitmek için doğal, düzensiz arazilerde hızlı ve verimli bir şekilde yürüyebilmeleri gerekiyor, ancak belki de gitmemeleri gerekiyor” dedi Lathrop.
Michael T. Tolley, UC San Diego’deki Mekanik ve Uzay Mühendisliği Bölümü’nde profesör ve makalenin senior yazarı.
“Genellikle, robotlar yalnızca belirli eklemlerde hareketi kontrol edebiliyorlar” dedi Tolley. “Bu çalışmada, bir robotun ayaklarının sertliğini ve dolayısıyla şeklini kontrol edebildiğini gösterdik ve geleneksel tasarımlardan daha iyi performans gösterdiğini ve çeşitli arazilere uyum sağlayabildiğini gösterdik.”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Esnek Robotik Ayaklar
Esnek robotik ayaklar, içlerinde kahve taneleri bulunan lateks bir membrandan oluşuyor. Kahve taneleri, katı ve sıvı arasında ileri geri gidebiliyor. Granüler medya, örneğin kahve tanelerinin bu şekilde davranmasına izin veren mekanizma, granül sıkışması olarak adlandırılıyor. Sonuç olarak, robotlar daha hızlı yürüyebiliyor ve daha iyi bir tutuş sağlayabiliyor.
Robot ayakları zemine dokunduğunda, sertleşiyorlar ve sağlam bir temel oluşturmak için yüzeye uyum sağlıyorlar. Hareket ettiklerinde, ayaklar gevşiyor ve adımlar arasında destek yapıları, esnek kalmalarına yardımcı oluyor.
Bu esnek ayaklar, düzensiz yüzeylerde test edilen ilk ayaklardı.

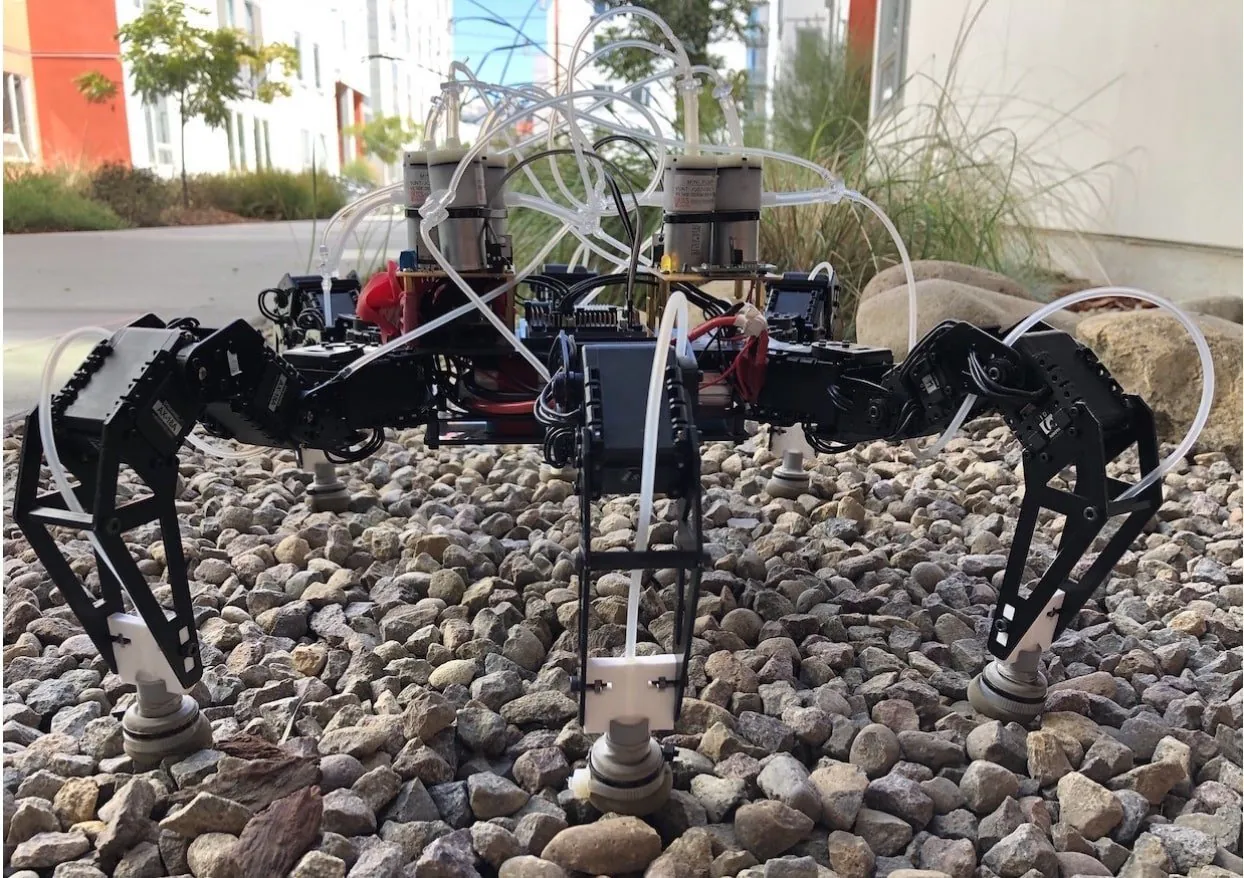
Araştırmacılar, ayakları bir hexapod robota taktiler ve bir borda sistemi tasarladılar ve inşa ettiler. Bord sistemi, her adımda ayakları gevşetmek ve sıkmak için negatif ve pozitif basınç üretebiliyor. Ayakları sıkmak için, bir vakum pompası kahve taneleri arasındaki havayı çıkarıyor. Ayrıca, robotun ağırlığının kahve taneleri arasındaki havayı çıkarması sonucu pasif olarak sıktırılabilirler.
Düzensiz Yüzeyler
Robot, düz zemin, odun talaşı ve çakıl gibi çeşitli yüzeylerde, esnek ayaklarla ve olmadan yürüyerek test edildi. Bulgular, pasif sıktırmanın düz zeminde en etkili olduğunu ve aktif sıktırmanın gevşek kayalar üzerinde en iyi olduğunu gösterdi.
Esnek ayaklarla, robotun bacakları zemine daha iyi tutundu, bu da hızını artırdı. Bu, özellikle robot eğimli ve düzensiz arazilerde yürüdüğünde doğruydu.
Nick Gravish, UC San Diego Mekanik ve Uzay Mühendisliği Bölümü’nde profesör ve çalışma yazarlarından biri.
“Doğal dünya, yürüyüş robotları için zorlu zeminlerle dolu – kaygan, kayalık ve yumuşak alt zeminler hepsi yürüyüşü karmaşık hale getiriyor” dedi Gravish. “Farklı türdeki zeminlere uyum sağlayabilen ayaklar, robotların hareketliliğini iyileştirmelerine yardımcı olabilir.”
Araştırmacılar, şimdi ayakların altına yumuşak sensörler entegre etmeye çalışacaklar, bu da bir elektronik kontrol kartının kullanılmasını sağlayacak. Elektronik kontrol kartı, robotun yürüyeceği zemin türünü tanıyacak ve ayakların aktif veya pasif olarak sıktırılması gerekip gerekmediğini belirleyecek. Araştırmacılar ayrıca, daha iyi verimlilik için tasarım ve kontrol algoritmalarını geliştirmeye devam edecekler.












