
Robotika
Mäkký robot sa potí, aby reguloval teplotu
Výskumníci na Cornell University vyvinuli mäkký robotický sval, ktorý je schopný regulovať svoju teplotu potením. Nový vývoj je jedným z mnohých, ktoré transformujú oblasť mäkkej robotiky.
Technika tepelného manažmentu je základnou súčasťou vytvárania nepripútaných, vysokovýkonných robotov, ktoré sú schopné pracovať po dlhú dobu bez prehriatia.
Projekt viedol Rob Shepherd, docent mechanického a leteckého inžinierstva na Cornell.
Tímový papier s názvom „Automatické potenie v 3D tlačených hydrogélových pohonoch“ Bola uverejnená v roku 2006 Vedecká robotika.
Jedným z najťažších aspektov vývoja odolných, adaptabilných a agilných robotov je riadenie vnútornej teploty robotov. Podľa Shepherda robot zlyhá alebo sa úplne zastaví, ak sa motory s vysokou hustotou krútiaceho momentu a exotermické motory zodpovedné za poháňanie robota prehrejú.
Tento problém sa vyskytuje najmä u mäkkých robotov, pretože sú vyrobené zo syntetického materiálu. Mäkké roboty sú flexibilnejšie, ale táto zvýšená flexibilita spôsobuje, že zadržiavajú teplo. To neplatí pre kovy, ktoré odvádzajú teplo oveľa rýchlejšie. Problém s technológiou vnútorného chladenia, ako je napríklad ventilátor, je ten, že by zaberal príliš veľa miesta vo vnútri robota a zvýšil by hmotnosť.
S ohľadom na tieto výzvy sa Shepherdov tím zameral na cicavce a ich prirodzenú schopnosť potiť sa ako inšpiráciu pre chladiaci systém.
„Schopnosť potiť sa je jednou z najpozoruhodnejších vlastností ľudí,“ povedal spoluautor štúdie TJ Wallin, vedecký pracovník z laboratórií Facebook Reality Labs. „Potenie využíva straty odparenej vody na rýchle odvádzanie tepla a môže sa ochladiť pod okolitú teplotu prostredia. ... Takže ako to často býva, biológia nám ako inžinierom poskytla vynikajúceho sprievodcu.“
Shepherdov tím spolupracoval s laboratóriom profesora inžinierstva Cornell Emmanual Giannelis. Spoločne vytvorili nanopolymérne materiály potrebné na potenie. Vyvinuli ich pomocou techniky 3D tlače nazývanej multimateriálová stereolitografia, ktorá sa spolieha na svetlo pri vytvrdzovaní živice do vopred navrhnutých tvarov.
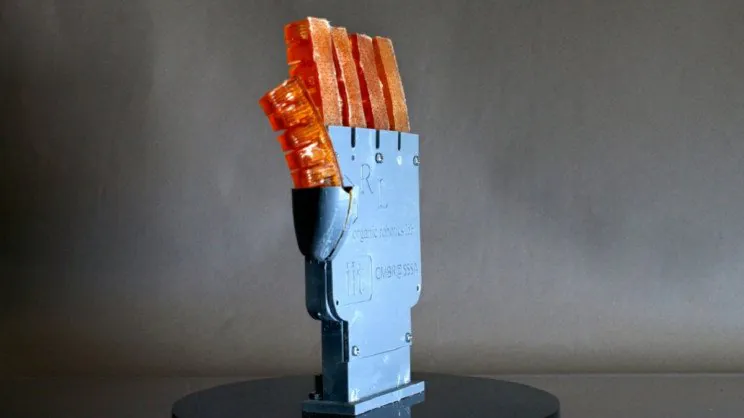
Výskumníci potom vyrobili ovládače podobné prstom, ktoré boli zložené z dvoch hydrogélových materiálov schopných zadržiavať vodu a reagovať na teplotu. Ďalším spôsobom, ako sa na to pozerať, je, že to boli „inteligentné“ špongie. Základnú vrstvu tvorí poly-N-izopropylakrylamid, ktorý na teploty nad 30°C (86°F) reaguje zmršťovaním. Táto reakcia vytlačí vodu do vrchnej vrstvy polyakrylamidu, ktorá je perforovaná mikrónovými pórmi. Póry reagujú na rovnaký teplotný rozsah a pri poklese teploty pod 30°C uvoľňujú „pot“ automatickým rozšírením pred uzavretím.
Keď sa voda vyparí, povrchová teplota pohonu sa v priebehu 21 sekúnd zníži o 30°C. Tento proces chladenia je podľa vedcov trikrát účinnejší ako ten u ľudí. Ak sú pohony vystavené vetru z ventilátora, môžu sa ochladzovať asi šesťkrát rýchlejšie.
Jedným z problémov tejto technológie je, že môže ovplyvniť mobilitu robota. Roboty musia tiež dopĺňať zásoby vody. Z tohto dôvodu si Shepherd predstavuje mäkkých robotov, ktorí sa nakoniec budú potiť a piť ako cicavce.
Nový vývoj tejto technológie sleduje veľmi zjavný vzor v robotickom priemysle. Technológia sa stále viac vyvíja na základe nášho prirodzeného prostredia. Či už ide o chladiaci proces potenia prítomný u cicavcov, neurónové siete založené na mesačných medúzach, Alebo umelá koža, robotika je odbor, ktorý v mnohom nadväzuje na to, čo už v prírode máme.















