Robotiikka
Oppimismenetelmä mahdollistaa robotien oppimisen ihmisten tarkkailun kautta
Carnegie Mellon Universityn (CMU) tutkijat ovat kehittäneet uuden oppimismenetelmän, joka mahdollistaa robotien suoraan oppimisen ihmisten kans/välisistä videoista ja yleistää tiedon uusiin tehtäviin, mikä auttaa niitä oppimaan, miten suorittaa kotitöitä. Oppimismenetelmää kutsutaan WHIRL:ksi, joka tarkoittaa In-the-wild Human Imitating Robot Learning, ja se auttaa robottia havainnoimaan tehtäviä ja keräämään videoaineistoa lopulta oppiakseen, miten suorittaa työ itsenään.
Tutkimus esiteltiin Robotics: Science and Systems -konferenssissa New Yorkissa.
Jäljittely tapana oppia
Shikhar Bahl on Ph.D.-opiskelija Robotics Institute (RI) -yksikössä Carnegie Mellon Universityn tietojenkäsittelytieteen laitoksessa.
”Jäljittely on hyvä tapa oppia”, Bahl sanoi. ”Robotien oppiminen suoraan ihmisten tarkkailun kautta on edelleen ratkaisematon ongelma alalla, mutta tämä työ edistää merkittävästi kyseisen taidon kehittymistä.”
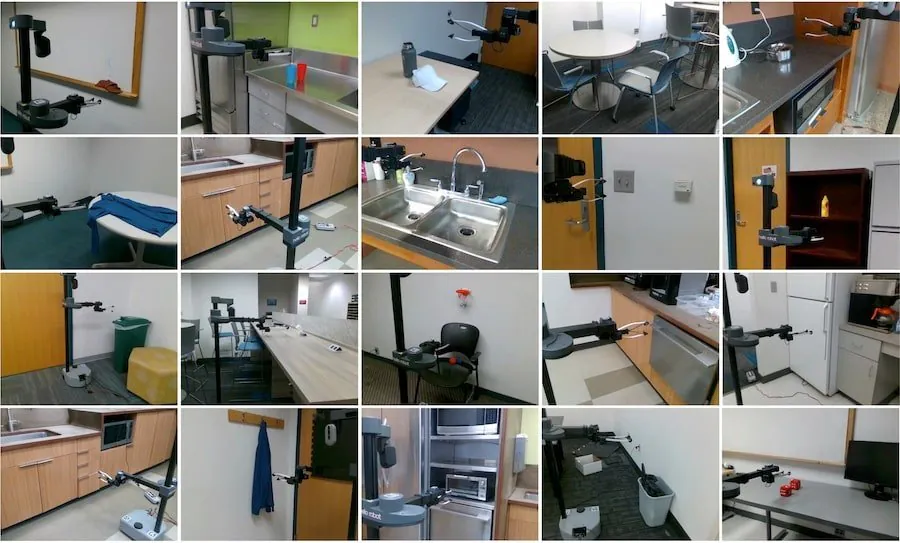
Bahl työskenteli Deepak Pathakin ja Abhinav Guptan kanssa, jotka molemmat ovat myös RI:n henkilöstöön kuuluvia. Tiimi lisäsi kameran ja ohjelmistonsa valmiiseen robottiin, joka oppi suorittamaan yli 20 tehtävää. Tehtäviin kuului kaikkea avaus- ja sulkemislaitteista roskapussin ottamiseen roskikasta. Jokaisella kerralla robotti katseli, kun ihminen suoritti tehtävän ennen kuin yritti itse.
Pathak on apulaisprofessori RI:ssä.
”Tämä työ esittää tavan tuoda robotit kotiin”, Pathak sanoi. ”Sen sijaan, että odotettaisiin, että robotit ohjelmoidaan tai koulutetaan suorittamaan eri tehtäviä ennen kuin ne voidaan ottaa käyttöön ihmisten kodeissa, tämä teknologia mahdollistaa robotien käyttöönoton ja oppimisen tehtävien suorittamiseen, sopeutuen ympäristöönsä ja parantuen pelkästään katsomalla.”
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL nykyisiin menetelmiin verrattuna
Useimmat nykyiset menetelmät robotin opettamiseen tehtävälle perustuvat jäljittelyyn tai vahvistusoppimiseen. Jäljittelyoppimisessa ihminen ohjaa manuaalisesti robottia ja opettaa sen suorittamaan tehtävän, mikä vaatii useita toistoja ennen kuin robotti oppii. Vahvistusoppimisessa robotti koulutetaan yleensä miljoonilla esimerkeillä simulaatiossa ennen kuin koulutusta sovelletaan todelliseen maailmaan.
Molemmat nämä mallit ovat tehokkaita opettamaan robotti yhdelle tehtävälle strukturoidussa ympäristössä, mutta ne osoittautuvat vaikeiksi skaalattaviksi ja käyttöönotettaviksi. WHIRL:in avulla robotti voi kuitenkin oppia minkä tahansa videon kautta, jossa ihminen suorittaa tehtävän. Se on myös helposti skaalattavissa, eikä se ole rajoitettu yhteen tiettyyn tehtävään, ja se voi toimia kotiympäristössä.
WHIRL mahdollistaa robotien suorittaa tehtäviä luonnollisissa ympäristöissään. Vaikka ensimmäiset yritykset usein päättyivät epäonnistumiseen, robotti oppi nopeasti vain muutaman onnistumisen jälkeen. Robotti ei aina suorita tehtävää samalla tavalla kuin ihminen, mutta se johtuu siitä, että sillä on erilaiset osat, jotka liikkuvat eri tavoin. Sanottakoon, että tehtävän lopputulos on aina sama.
”Robotiikan skaalauttamiseksi luonnonvaraisten olosuhteiden keskellä datan on oltava luotettavaa ja stabiilia, ja robotit tulisi parantaa ympäristössään harjoittelemalla itse”, Pathak sanoi.
