Robótica
Método de aprendizaje permite que los robots aprendan observando a los humanos
Un nuevo método de aprendizaje desarrollado por investigadores de la Universidad Carnegie Mellon (CMU) permite que los robots aprendan directamente de videos de interacción humana y generalicen la información a nuevas tareas, lo que les ayuda a aprender a realizar tareas domésticas. El método de aprendizaje se llama WHIRL, que significa Aprendizaje de Robot Imitador Humano en el mundo real, y ayuda al robot a observar las tareas y recopilar los datos de video para eventualmente aprender a completar el trabajo él mismo.
La investigación se presentó en la conferencia Robotics: Science and Systems en Nueva York.
La imitación como forma de aprender
Shikhar Bahl es un estudiante de doctorado en el Instituto de Robótica (RI) de la Escuela de Ciencias de la Computación de la Universidad Carnegie Mellon.
“La imitación es una excelente forma de aprender”, dijo Bahl. “Que los robots aprendan directamente observando a los humanos sigue siendo un problema sin resolver en el campo, pero este trabajo da un paso significativo para habilitar esa capacidad”.
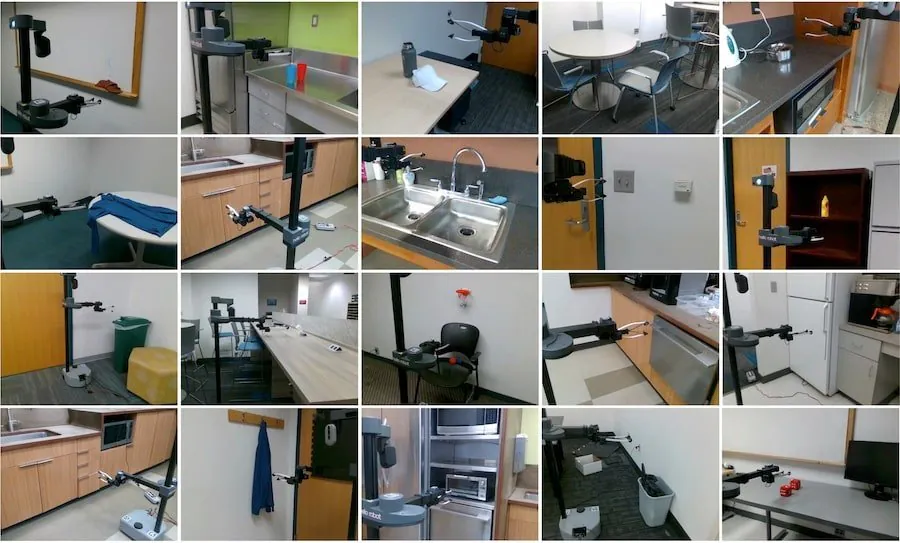
Bahl trabajó junto con Deepak Pathak y Abhinav Gupta, quienes también son miembros de la facultad del RI. El equipo agregó una cámara y su software a un robot estándar que aprendió a completar más de 20 tareas. Estas tareas incluyeron desde abrir y cerrar electrodomésticos hasta sacar una bolsa de basura de la papelera. Cada vez que el robot vio a un humano completar las tareas antes de intentarlo él mismo.
Pathak es profesor asistente en el RI.
“Este trabajo presenta una forma de llevar a los robots al hogar”, dijo Pathak. “En lugar de esperar a que los robots sean programados o entrenados para completar tareas con éxito antes de desplegarlos en los hogares de la gente, esta tecnología nos permite desplegar a los robots y que aprendan a completar tareas, adaptándose a sus entornos y mejorando solo observando”.
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL vs. Métodos actuales
La mayoría de los métodos actuales para enseñar a un robot una tarea dependen de la imitación o el aprendizaje por refuerzo. Con el aprendizaje por imitación, los humanos operan manualmente un robot y le enseñan a completar una tarea, lo que requiere ser realizado múltiples veces antes de que el robot aprenda. Con el aprendizaje por refuerzo, el robot suele ser entrenado con millones de ejemplos en simulación antes de adaptar el entrenamiento al mundo real.
Si bien ambos modelos son eficientes para enseñar a un robot una tarea en un entorno estructurado, resultan difíciles de escalar y desplegar. Pero con WHIRL, un robot puede aprender de cualquier video de un humano que complete una tarea. También es fácilmente escalable, no está limitado a una tarea específica y puede operar en entornos domésticos.
WHIRL permite que los robots realicen tareas en sus entornos naturales. Y aunque los primeros intentos suelen terminar en fracaso, puede aprender muy rápidamente después de solo unos pocos éxitos. El robot no siempre completa la tarea con los mismos movimientos que un humano, pero eso se debe a que tiene diferentes partes que se mueven de manera diferente. Con eso dicho, el resultado final de completar las tareas es siempre el mismo.
“Para escalar la robótica en el mundo real, los datos deben ser confiables y estables, y los robots deben mejorar en su entorno practicando por su cuenta”, dijo Pathak.
